
本文討論基于SOC單片機技術的定位監控系統設計。該系統由2部分組成:定位終端和監控中心。定位終端以C8051F021作為核心微處理器,通過2個串口與SIEMENS M-C35i GPRS模塊和GR-87衛星接收模塊進行串行通信,接收GPS接收機發出的定位數據并控制SIEMENS MC35i GPRS模塊。該系統采用看門狗電路,以保障控制器的正常運行。定位終端所采集的定位信息通過GPRS網絡,以短信的形式發送到監控中心。本文以VC為開發平臺,采用VC++進行MapX二次開發制作電子地圖,從而在監控中心實現了定位信息的采集、處理和顯示。實際定位過程表明:該系統定位精度高、信息傳輸速率快。
1 系統總體設計
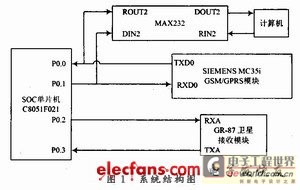
該設計主要由基于SoC技術的單片機C805lF021,SIEMENS MC35i GSM/GPRS模塊和GR-87衛星接收模塊組成。定位終端以C8051F021作為核心控制器,通過兩個串口UART0,UART1分別控制SIEMENS MC35i GSM/GPRS模塊和GR-87衛星接收模塊進行串行通信,并控制SIEMENS MC35i GSM/GPRS模塊以GPRS服務形式把數據發送給監控中心。SoC單片機C8051F021接收來自GR-87衛星接收模塊的定位信息,并對接收的信息進行校驗,選擇所需信息再添加相應的代碼,組成數據包,然后將它們存儲在C8051F021內置的FLASH(程序儲存器FLASH上有只用于數據的臨時儲存器)上。
采集、處理、顯示定位信息在上位機上,由電子地圖完成。監控中心通過調用MapX的接口函數,實現電子地圖的一系列功能來處理和顯示定位信息。
SIEMENS MC35i GSM/GPRS模塊有SMS和GPRS通信兩種數據工作模式。模塊上電啟動過程為3~5 s,若SIEMENS MC35i GSM/GPRS模塊接有有效的SIM卡,模塊將附著在GPRS網絡上,通過串口以AT指令的方式要求模塊將經、緯度信息以短消息的形式發到監控中心,當然監控中心也可以通過模塊發送相關的指令給SoC單片機,SoC單片機分析所接受的指令,然后通過I/O口做出相應處理。系統結構圖如圖1所示。
2 系統硬件實現
2.1 核心控制器的實現
系統使用的單片機是CYGNAL公司生產的SoC單片機C8051F02X,該單片機是集成的混合信號系統級芯片,具有與8051兼容的微控制器內核(運算速度高達25 MIPS),與MCS-51指令集完全兼容;C8051F單片機具有片內調試電路,通過4腳JTAG接口,可以進行非侵入式、全速的在系統調試;C8051F高速SoC的芯片上還集成了構成單片機控制系統所需的幾乎所有模擬、數字外設及其他功能部件(包括ADC、DAC、可編程增益放大器、電壓比較器、電壓基準、溫度傳感器、SMBus/I2C、UART、SPI、定時器、可編程計數器/定時器陣列PCA、內部振蕩器、看門狗定時器及電源監視器等)。這些外設的高度集成,為設計小體積、低功耗、高可靠性、高性能的單片機應用系統提供了極大的方便,可大大降低系統的整體成本。
控制器采用串口和GPS以及GPRS進行通信;引出JTAG串行接口,即全速、非侵入式的系統調試接口(片內),通過該接口能對控制器內部FLASH存儲器進行系統編程,并可與片內調試支持電路通信。
本系統把單片機的P0.0,P0.1,P0.4配置為GPRS模塊的輸入、輸出和啟動,通過三極管啟動GPRS后接收和發送定位信息;P0.2,P0.3配置為GPS模塊的輸入和輸出,來獲取定位信息。
2.2 SIEMENS MC35i GPRS模塊
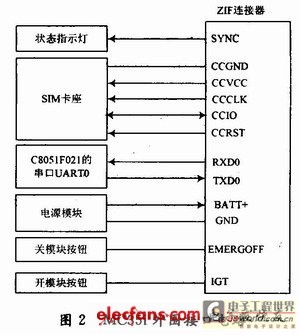
MC35i是SIEMENS公司推出的新一代無線通信GPRS模塊,MC35i模塊主要由GSM基帶處理器、GSM射頻模塊供電模塊(ASIC)、FLASH、ZIF連接器天線接口6部分組成。通過獨特的40引腳的ZIF連接器實現電源、連接指令、數據、語音信號及控制信號的雙向傳輸。通過ZIF連接器及50 Ω天線連接器可分別連接SIM卡座和天線。MC35i的40個引腳通過ZIF連接器分別與電源電路、啟動與關機電路、數據通信電路、語音通信電路、SIM卡電路、狀態指示燈電路等連接。MC35i外圍接口電路如圖2所示。
2.3 GR-87衛星接收模塊
GPS信號接收機功能:捕獲按一定衛星高度截止角度所選擇的待測衛星的信號,并跟蹤這些衛星的運行,對所接收到的GPS信號進行變換、放大和處理,以便測量出GPS信號從衛星到接收機天線的傳播時間,解譯出GPS衛星所發送的導航電文,實時地計算出測量站的三維位置,甚至三維速度和時間,最后經過標準的I/O口輸出定位數據。本系統采用臺灣長天科技股份有限公司(HOLUX)的GR-87衛星接收模塊來獲得定位數據。GPS接收機的輸出語句均按串行通信協議,數據格式為8個數據位,1個起始位,1個停止位,無奇偶校驗,可以根據需要選擇波特率,本系統選擇波特率為4 800 b/s。本系統中接收NMEA格式消息作為原始數據輸入,它的輸出頻率為1 Hz。輸出數據采用ASCII字符碼,輸出語句達多十幾種,包括GGA,GSA,GSV,RMC,RMT,VTG等。這些定位數據語句不僅給出了位置、速度、時間等信息,而且指出當地的衛星接收情況,其中GGA定位數據語句是最常用的。
3 系統軟件設計
3.1 定位終端的軟件實現
該定位終端的軟件采用模塊化的設計方法,其模塊主要包括系統的初始化、GPS定位信息的處理、GPRS定位信息的發送。GPS定位信息的處理以串口UART1的中斷方式執行,GPRS定位信息的發送以循環方式執行。
系統的初始化包括系統時鐘初始化、端口初始化、串口初始化和GPRS的啟動。系統時鐘初始化采用外部晶振22.118 4 MHz,不分頻;端口初始化配置交叉開關,給URAT0,URAT1分配端口引腳;串口初始化設置串口的工作方式,通過GPS和GPRS的波特率,計算定時器的值。
3.2 上位機的軟件實現
監控中心是將GIS軟件MapInfo嵌入到VC6中進行開發,這使得MapInfo中的地圖窗口可以合并到VC中,從而利用VC在數據庫方面的強大功能,也很好地利用了Maplnfo對地理信息直觀形象地處理優勢。通過調用MapX的接口函數,實現電子地圖的一些基本功能。編寫程序將定位終端和監控中心連接起來,將定位終端獲取的定位信息顯示在電子地圖上。
4 實驗結果
本文將基于SOC技術的定位監控用于實際定位過程中,對定位監控進行了測試,定位區域選擇為武漢科技大學校本部圖書館前的馬路。實驗結果如圖3所示。
由圖3可以看出,系統運行良好,滿足定位監控的定位要求。
5 結語
本文基于先進的SoC技術實現了GPS/GPRS定位監控的設計,詳細說明了該系統的硬件和軟件結構,通過核心控制器C8051F021對GPS模塊和GPRS模塊進行雙模塊控制。用VC++進行MapX二次開發,將MapInfo中的地圖窗口合并到VC中,利用了VC在數據庫方面的強大功能,也很好地利用了Maplnfo對地理信息直觀形象的處理優勢。