
摘 要: 在天線單元設計中采用了高頻、低噪聲放大器,以減弱天線熱噪聲及前面幾級單元電路對接收機性能的影響;基于超外差" title="超外差">超外差式電路結構、鏡頻抑制和信道選擇原理,選用GP2010芯片實現了射頻單元的三級變頻方案,并介紹了高穩定度本振" title="本振">本振信號的合成和采樣量化器的工作原理,得到了導航電文相關提取所需要的二進制數字中頻衛星信號" title="衛星信號">衛星信號。
關鍵詞: GPS接收機 靈敏度 超外差 鎖相環 頻率合成
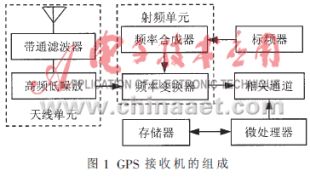
利用GPS衛星實現導航定位時,用戶接收機的主要任務是提取衛星信號中的偽隨機噪聲碼和數據碼,以進一步解算得到接收機載體的位置、速度和時間(PVT)等導航信息。因此,GPS接收機是至關重要的用戶設備。目前實際應用的GPS接收機電路一般由天線單元、射頻單元、通道單元和解算單元等四部分組成,如圖1所示。本文在分析GPS衛星信號組成的基礎上,給出了射頻前端GP2010的原理及應用。
1 GPS衛星信號的組成
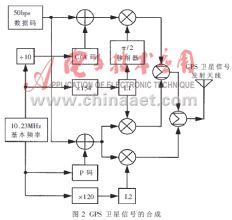
GPS衛星信號采用典型的碼分多址(CDMA)調制技術進行合成(如圖2所示),其完整信號主要包括載波、偽隨機碼和數據碼等三種信號分量[1]。信號載波處于L波段,兩載波的中心頻率分別記作L1和L2。衛星信號參考時鐘頻率f0為10.23MHz,信號載波L1的中心頻率為f0的154倍頻,即:
fL1=154×f0=1575.42MHz (1)
其波長λ1=19.03cm;信號載波L2的中心頻率為f0的120倍頻,即:
fL2=120×f0=1227.60MHz (2)
其波長λ2=24.42cm。兩載波的頻率差為347.82MHz,大約是L2的28.3%,這樣選擇載波頻率便于測得或消除導航信號從GPS衛星傳播至接收機時由于電離層效應而引起的傳播延遲誤差。偽隨機噪聲碼(PRN)即測距碼主要有精測距碼(P碼)和粗測距碼(C/A碼)兩種。其中P碼的碼率為10.23MHz、C/A碼的碼率為1.023MHz。數據碼是GPS衛星以二進制形式發送給用戶接收機的導航定位數據,又叫導航電文或D碼,它主要包括衛星星歷、衛星鐘校正、電離層延遲校正、工作狀態信息、C/A碼轉換到捕獲P碼的信息和全部衛星的概略星歷;總電文由1500位組成,分為5個子幀,每個子幀在6s內發射10個字,每個字30位,共計300位,因此數據碼的波特率為50bps[2]。
數據碼和兩種偽隨機碼分別以同相和正交方式調制在L1載波上,而在L2載波上只用P碼進行雙相調制,因此L1和L2的完整衛星信號分別為:

式中,AP、BP、AC分別為P碼和C/A碼的振幅;Pi(t)、Ci(t)分別為對應P碼和C/A碼的偽隨機序列碼;Di(t)為衛星導航電文數據碼;ωL1、ωL2分別為L1和L2載波信號的角頻率;φC和φP1、φP2分別為C/A碼和P碼對應于載波的起始相位。合成的GPS信號向全球發射,隨時隨地供接收機解算導航定位信息使用。
2 GPS接收機的靈敏度
GPS接收機對信號的檢測質量取決于信噪比" title="信噪比">信噪比,當其為“理想接收機”時,接收機輸入端的信噪比Si/Ni與其輸出端的信噪比So/No相同。由于實際GPS接收機存在內部噪聲,使得(So/No)<(Si/Ni);而噪聲越大,輸出信噪比就越小,則接收機的性能越差,此時接收機的噪聲系數" title="噪聲系數">噪聲系數為:

式(5)表明由于內部噪聲影響,接收機輸出端信噪比相對于輸入端信噪比變差的倍數,由式(5),輸入信號額定功率可表示為:

式(6)給出了GPS接收機在噪聲背景下接收衛星信號的能力,接收機不僅要將輸出信號放大到足夠的數值,更重要的是要使輸出端的信噪比So/No達到所需比值。令(So/No)≥(So/No)min時對應的接收機輸入信號功率的最小可檢測信號功率為Simin,通常用它表示接收機的靈敏度。由于接收機的輸入噪聲額定功率
由式(9)可知,為了提高GPS接收機的靈敏度,就要減少最小可檢測信號功率Simin,因此在接收機電路設計中一方面要考慮盡量降低接收機的總噪聲系數Fo,另一方面應設法提高噪聲背景下GPS接收機輸出端的信噪比So/No。
3 GPS接收機天線單元
天線單元的主要功能是接收空中GPS衛星信號,從而為接收機射頻前端提供較為純凈的完整衛星信號。在接收機設計中,當兩個單元電路級聯時(如圖3所示),如果第一、二級單元電路的噪聲系數和額定功率增益分別為F1、F2和G1、G2,其帶寬均為Bn;設級聯電路的總噪聲系數為Fo,則其實際輸出的額定噪聲功率No為:

其中No12是由于第一級單元電路的噪聲在第二級單元電路輸出端呈現的額定噪聲功率,△N2是由于第二級單元電路所產生的噪聲功率,且
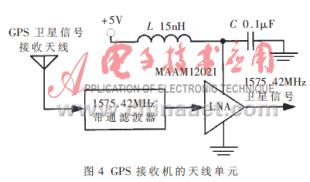
可見,GPS接收機中各級單元電路的內部噪聲對級聯后總噪聲系數的影響有所不同,級數越靠前的單元電路的噪聲系數對總噪聲系數的影響越大。因此,總噪聲系數主要取決于最前面幾級單元電路的噪聲系數,其中天線熱噪聲對接收機性能影響最大,故設計時采用接收天線、射頻頻段選擇帶通濾波器及高頻低噪放(LNA)等器件組成天線單元(如圖4所示)。天線單元采用DC 5V供電,其中LNA采用高增益、低噪聲、高頻放大器MAAM12021,其增益高達21dB、噪聲系數低于1.55dB,有利于降低GPS接收機的總噪聲系數;其工作頻段處于1.5~1.6GHz,適合于C/A碼GPS接收機的頻帶需求,可滿足高增益和低噪聲系數的性能指標要求。
4 GPS接收機射頻單元
噪聲總是伴隨著信號同時出現,盡可能提高噪聲背景下輸出端的信噪比是改善接收機靈敏度的重要措施。GPS接收機天線單元接收并提供給射頻單元的信號頻率很高而信道帶寬又很窄,要直接濾出所需信道,則需Q值非常大的濾波器,至少目前的技術水平難以滿足這一指標;另外高頻電路在增益、精度和穩定性等方面的問題,在高頻范圍直接對GPS衛星信號進行解調很不現實[4]。為此,在射頻單元設計中采用“超外差”式多級變頻配合匹配濾波器的電路結構,以消除噪聲干擾,解決高頻信號處理中所遇到的困難。適合這種電路結構的芯片采用了第二代GPS接收機射頻前端GP2010。它采用44引腳、貼面方形封裝,主要集成了頻率合成器、混頻器、自動增益控制(AGC)電路以及數字量化器等。GP2010接收的信號頻率與L1載波的衛星信號頻率兼容,主要用于設計C/A碼GPS接收機的射頻單元。微弱的GPS高頻信號通過超外差式三級混頻電路,去掉了其它信道干擾,獲得了足夠增益,解調并提取出所需的中頻信息。圖5給出了前兩級超外差式下變頻器和帶有自動增益控制(AGC)電路的第三級混頻器的工作原理圖,每經過一次下變頻,輸出信號的頻率降低、幅度增大,而其它信道和頻段的干擾則被逐步濾除[5]。
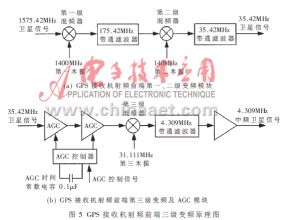
GP2010利用混頻器將高頻GPS信號搬到很低中頻頻率的同時引入了鏡頻干擾,而利用濾波器對鏡頻干擾的抑制效果取決于鏡頻頻率與信號頻率之間的距離,或者說取決于中頻頻率的高低。如果中頻頻率高,則信號與鏡頻相距較遠,那么鏡頻成份就能受到較大抑制;反之,如果中頻頻率較低,則信號與鏡頻相隔不遠,濾波器對干擾的濾除效果就比較差。由于信道選擇在中頻進行,同理,較高的中頻頻率對信道選擇濾波器的要求也較高,于是鏡頻抑制與信道選擇形成一對矛盾,而中頻頻率的選擇成為平衡這對矛盾的關鍵。所以在GPS接收機設計中,通常使用兩級或三次變頻來取得更好的折衷。
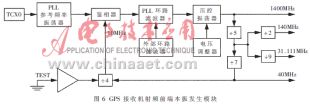
由圖5可看出,GP2010的三級變頻器采用了中心頻率分別為175.42MHz、35.42MHz和4.309MHz的三個中頻濾波器。各級混頻器需要的本振信號均由片內集成鎖相環(PLL)頻率合成器提供(如圖6所示)。它主要由PLL振蕩器回路、鑒相器、PLL環路濾波器、分頻器和一個完整的1400MHz壓控振蕩器(VCO)等元件組成。PLL采用10.000MHz參考頻率;VCO的控制增益為150MHz/V、輸出頻率范圍為1386~1414MHz。為了提供高穩定度參考頻率源,設計中采用了溫度補償型晶體振蕩器(TCXO)自輸入阻抗為5kΩ的參考頻率端提供10.000MHz的AC小信號頻率給PLL振蕩器。當PLL相位鎖定參考信號時,鑒相器輸出邏輯高電平指示相位已鎖定,相位鎖定時間約需6ms,環路增益約為150dB。VCO輸出的1400MHz信號作為第一本振信號,由其分頻產生的140.0MHz、31.111MHz信號分別作為第二本振和第三本振信號。當GP2010接收到1575.42MHz的GPS衛星信號時,通過三級變頻可得到4.309MHz的中頻信號[6]。
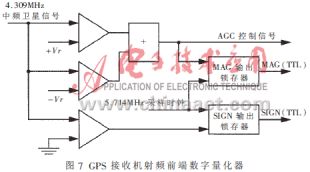
為配合通道單元和解算單元完成導航信息的數字提取及信號處理,在5.714MHz采樣時鐘控制下,GP2010的片內集成數字量化器可實現對4.309MHz的中頻衛星信號進行數字量化,從而為通道單元相關器提供TTL電平的2位量化輸出,即1.405MHz的二進制符號及量值數字信息,如圖7所示。為了得到平穩的中頻衛星信號及采樣數字輸出,該模塊同時產生AGC控制信號用于穩定第三級變頻(如圖5(b)所示)時所產生的中頻信號幅度。
總之,GP2000芯片組是Zarlink半導體公司為設計GPS接收機而推出的一系列集成電路,采用GP2000芯片組可設計出多通道衛星信號接收設備。在GPS接收機設計中,天線單元的設計著重考慮頻段選擇和高頻低噪放對接收機總噪聲系數的影響,以提高接收機靈敏度;射頻單元利用頻率合成、頻率變換、自動增益控制等技術,依靠高品質的中頻頻率選擇、鏡頻抑制和信道選擇濾波器,對所接收的GPS信號進行變頻、放大、濾波、采樣等一系列處理,從而得到數字中頻衛星信號。由此精心設計的超外差式GPS接收機可達到很高的接收靈敏度、頻率選擇性和較大的動態范圍,并具有結構簡單、體積小、重量輕、耗電省等優點。
參考文獻
1 李洪濤,許國昌,薛鴻印等. GPS應用程序設計[M].北京:科學出版社,1999
2 袁建平,羅建軍,岳曉奎等.衛星導航原理與應用[M].北京:中國宇航出版社,2003
3 丁露飛,耿富錄.雷達原理[M](第3版).西安:西安電子科技大學出版社,2002年6月
4 陳志恒,宋琦明. 零中頻無線接收機:理想、現實與演化[J].電子產品世界,2001;(11)A版:56~59
5 Zarlink Semiconductor.GP2010 GPS Receiver RF Front End [M],DS4056,Issue 3.4, October 1996
6 Zarlink Semiconductor.GP2000 GPS Receiver Hardware Design[M], AN4855,Issue 2.0, October 1999