
1 前言
船舶電站監控系統主要用于監控船舶發電機組的運行狀態,調節改善船舶供電的電力品質。本系統取代傳統的點對點連線的控制方法,采用CAN 現場總線技術,實現發電機組的遠程控制。基于CAN 總線具有結構簡單、通信方式靈活的特點及其非破壞總線仲裁技術,為該監控系統提高數據傳輸可靠性、增強系統運行穩定性提供了新的解決方案。
2 網絡通信平臺設計
船舶電站監控系統采用 CAN 現場總線連接各設備,通信網絡由監測網絡與控制網絡組成,采用雙冗余總線結構,系統網絡結構圖如圖1 所示。
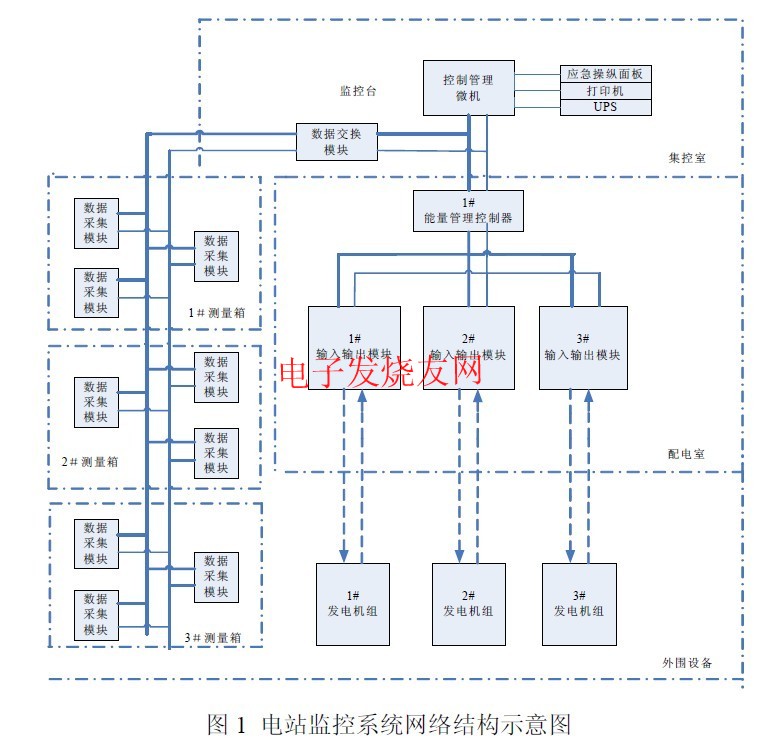
監測網絡由若干個數據采集模塊與1 個網關組成,主要負責采集傳輸現場用于測量柴油發電機組繞組溫度、燃油壓力等傳感器數據;控制網絡由1 臺上位機、1 臺能量管理控制器與3 個輸入輸出模塊組成,完成對柴油發電機組起動、停車、合閘、解列以及能量管理的
遙控控制。監測網絡和控制網絡均采用雙絞線電纜作為通訊介質,根據網絡規模與數據傳輸流量,設置網絡總線速率為100kpbs。
數據采集模塊:數據采集模塊根據不同的傳感器類型分別能夠采集、測量 Pt100 溫度信號、4~20mA 電流信號以及開關量等信號。
能量管理控制器:實現電站監視與電能管理功能。
輸入輸出模塊:接收來自能量管理控制器的命令,控制發電機組運行,同時監測發電機組相關的電參數。
網關:實現不同網絡間的數據交換。
監測網絡部分:數據采集模塊從外部采集傳感器數據后,將數據發送至網關,網關將所有傳感器數據發送至上位機完成集中顯示與報警功能。
控制網絡部分:上位機將人工控制命令發送至能量管理控制器,該控制器將控制命令進行處理表決,將結果發送至輸入輸出模塊,由輸入輸出模塊輸出控制信號控制發電機組狀態。另外,輸入輸出模塊采集發電機組相關電參數(電壓,電流,有功、無功功率等)發送至能量管理控制器進行監測與管理。
網絡系統由兩條總線構成硬件雙冗余結構,若其中一條總線電纜受損或出現故障后,另一條總線仍能維持系統正常工作,防止通信網絡癱瘓。此外,為了保證通信網絡的可靠性與實事性,各個網絡節點還具有在線故障診斷,傳感器故障診斷等功能。
3 網絡通信標識符設計
在該網絡通信系統中,底層智能模塊選用Intel16 位的MCU,CAN 網絡控制器選用Philips 公司的SJA1000,實現CAN 網絡數據收發功能,系統中網絡總線使用CAN2.0B 協議格式,根據該系統監測網絡與控制網絡的不同功能,分別設計兩種網絡的報文標識符。
3.1 監測網絡協議:
監測網絡中的數據采集模塊采集現場傳感器的模擬信號,通過 A/D 轉換將其轉換為數字量信號后發送至監測網絡,數據刷新頻率為每秒2 批次。對于監測模塊而言,僅僅發送測量所得的現場傳感器數據,不需要接收其他網絡數據,因此設置驗收屏蔽寄存器禁止其他網絡數據接收,網關接收到各個數據采集模塊發送的數據之后將其發送至上位機。下表為監測網絡的報文標識符定義:

每個數據采集模塊分配唯一的網絡節點號,每個網絡節點分配節點地址,此外,為了使網關設備快速判斷各數據采集模塊工作以及所發送的報文是否出現異常狀況,每個數據采集模塊在發送各自的報文時設置索引值,使用CAN 標識符的第13~22 位表示。當某個數據采集模塊起動新的一個批次數據發送時,索引值清零,每發送成功一幀報文后下一幀報文的索引值加1,當前批次數據發送完畢后索引值計數器清零,從而可根據每個模塊在一個批次內發送的報文個數確定該模塊的最大索引值。接收方在接收到某一節點發送的報文后先判斷標識符中的索引值信息,若接收到報文的索引值為不合理數值,則放棄對當前報文的接收處理。由此可以防止網關接收在傳輸時或者程序出錯時產生錯誤的報文,以提高網絡數據的可靠性。此外,監測網絡數據采集模塊設置定時向網關設備發送表示自身通信是否正常的協議幀,網關將其接收后轉發至上位機向用戶顯示系統網絡各個單元當前的工作狀態,即網絡通訊狀態。
3.2 控制網絡協議:
控制網絡中產生的控制命令一般是猝發式的,對于控制系統而言必須確保控制命令被及時并且成功的發送,控制網絡報文標識符定義如下表所示:

CAN 總線中非破壞性總線仲裁技術,是從協議幀標識符的最高位開始,即BIT.28 逐位比較下去,當出現參加仲裁的雙方在某一位第一次出現顯隱性不同時,為顯性位的那個協議幀贏得仲裁。根據CAN 總線的這一特性,即標識符值越小發送優先級越高,根據系統總線流程以及控制網絡中各網絡節點優先級的高低從小到大設置各個模塊的網絡節點號,如表3 所示:

當控制網絡數據發送頻繁時,可能導致部分控制命令幀由于標識符優先級的原因而丟失SJA1000 控制器的仲裁,雖然SJA1000 具有丟失仲裁后的自動重新發送該報文的功能,但該控制命令幀仍然存在發送失敗的可能性,最終導致控制功能的失效。CAN 協議幀優先晉升方案能夠大大降低上述情況發生的可能性,為實現控制命令幀發送時在丟失仲裁后重發的優先級晉升,則必須禁止MAC 子層的自動重發功能,由應用層來實現報文的重發。該系統采用Philips 公司的SJA1000 作為CAN 網絡控制器,可以通過在報文發送時設置其命令寄存器的第0、1 位禁止其自動重發功能,改為單次發送。
起動發送報文之后,MCU 須判斷該網絡節點是否已經成功發送了一條報文或者報文發送失敗:首先,當SJA1000 中斷寄存器出現了仲裁丟失中斷或者發送中斷,表明該節點已經處理完了一條報文,但是仍然不知道是否發送成功。如果成功,中斷寄存器就沒有仲裁丟失中斷,但是會產生發送中斷,因為發送成功后發送緩沖區會釋放。如果發送不成功,一定是與較高優先級的協議幀競爭的結果,所以會有仲裁丟失中斷。但是改為單次發送后,發送失敗以后也會釋放緩沖區,因此將同時產生仲裁丟失中斷以及發送中斷。在得到節點已經處理完一條報文后,只要用以上的規則進行判斷就能知道上一條報文是否發送成功,也就是用來判斷是否需要晉升節點所發送信息幀的優先級并重發該幀。
控制網絡的標識符劃分為三個部分,其中標識符的第 21 至28 位用于協議幀優先晉升,這部分標識僅表示協議幀的優先級,它由調度機制分配給協議幀的優先級的變化而變化,設Pi=(2n-1)-kt,Pi 項為當前控制命令協議幀的優先級,(2n-1)代表其優先級隊列的初始值,即為隊尾;n 為優先級隊列的二進制數,BIT28:21 共有8 位數,所以這一項數值為0FFH。kt表示優先級晉升項,t 為首次發送以來協議幀丟失仲裁的次數,k 為晉升權重,k 取值越大協議幀優先晉升速度就越快(該系統中取k=1)。由此可見,當某協議幀第一次發送時,Pi=0FFH,當它在發送時與其他協議幀碰撞并失去仲裁時,退出發送并且置Pi=0FEH 重新發送,因為此時其優先級高于其他協議幀,在整個網絡中如果沒有其他和它具有相同優先級的協議幀同時發送時,即使與其他第一次發送的協議幀碰撞,也會贏得仲裁,所以增大了該幀發送成功的概率。下圖為報文優先級晉升控制流程:
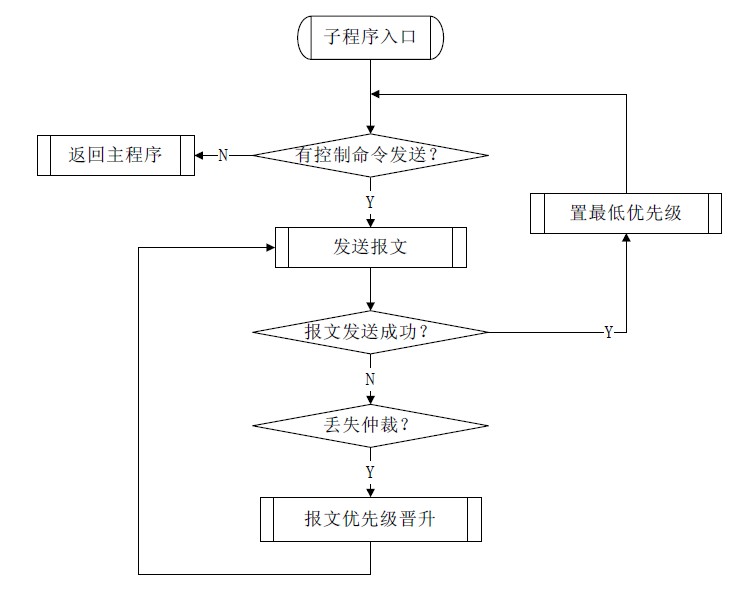
圖 2 報文優先級晉升控制流程
除此之外,系統具有控制參數在線修改的功能(如修改系統參數)。參數修改命令由上位機發出修改幀,能量管理控制器接收后進行操作執行。當進行在線控制參數修改時,能量管理控制器將發出廣播消息通知控制網絡所有節點禁止所有控制動作的輸出,以防止意外情況的發生。
在進行參數的下載修改過程中,為避免修改幀發送失敗或丟失,從而導致系統參數混亂,甚至導致系統癱瘓的情況發生,使用幀標識符的第11、12 位表征修改幀的結構類型:單幀、非結束多幀和結束多幀。當待修改的參數數量較少,單個協議幀能夠包含所有修改信息時,能量管理控制器接收到來自上位機的修改幀,并判斷該修改幀為單幀標識后,則立即進行參數存儲空間的修改;若待修改的參數較多,單個協議幀無法包括所有待修改數據時,上位機首先發出部分修改幀使用非結束多幀標識,發送至最后一個修改幀時,標記為結束多幀。功率管理模塊只有在將全部待修改的參數接收完畢(即收到結束多幀標識)之后,才開始對相應參數存儲空間進行數據修改的操作。完成操作之后,能量管理控制器再將相應存儲空間修改完畢的數據發送反饋至上位機,進行握手確認。采用以上系統參數修改機制同時結合協議幀優先晉升方案,大幅提升了電站重要參數修改的可靠性。

4 結束語
船舶電站監控系統網絡通信的實現,節省了大量的現場線纜,整個系統便于調試。網絡數據傳輸過程中使用的協議幀優先級晉升算法機制等處理方案以及雙冗余的網絡硬件結構,提高了現場總線網絡的可靠性和穩定性。