
摘? 要:?介紹一種安裝于假人體內的多通道采集器" title="采集器">采集器的設計實現。采集器擁有16個采集通道,采用CAN總線通訊。使用這種采集器,假人無須拖線測量,減少了試驗中斷線的可能,提高了測量的可靠性。
關鍵詞: 數據采集? CAN總線? 微控制單元? HybridⅢ假人? 汽車碰撞
?
HybridⅢ假人是國際上汽車正面碰撞試驗使用的標準假人,其中50百分位男性假人應用最為廣泛,除了應用于汽車碰撞試驗外,還用于其它沖擊試驗中,如航空工業的飛機座椅彈射試驗以及載人航天的回收艙落地沖擊試驗等。
HybridⅢ假人的頭部、頸部、胸腔、骨盆、四肢的骨骼和關節處都經專門設計,不僅其沖擊響應與真人相似,而且這些部位均可安裝相應的傳感器。
通常,在汽車碰撞試驗中,這些傳感器的導線從假人身體引出,然后連接到數據采集設備上。這樣做帶來的問題是,拖著的導線會因為運動和劇烈的撞擊造成信號干擾或者斷線。而汽車碰撞是破壞性試驗,試驗成本非常高,因此為了提高試驗可靠性,最好把數據采集系統" title="采集系統">采集系統完全內置于HybridⅢ假人內部。
但是假人內部空間狹小,現有采集系統很難安裝進去,因此必須充分利用假人內部的空間,設計一個體積小、多通道、耐沖擊的采集器。
1 采集系統設計要求和總體結構
1.1 設計要求
汽車碰撞法規對假人不同部位測量通道的頻率響應作出了規定。根據我國的汽車碰撞法規《關于正面碰撞乘員保護的設計規則CMVDR294》的要求,測量通道最高頻率等級的要求是CFC1000,即:采樣頻率" title="采樣頻率">采樣頻率>8kHz,最低通過頻率<0.1Hz,最高通過頻率為1650Hz。此外,法規還對濾波器的相位滯后以及采樣同步性作出了要求。
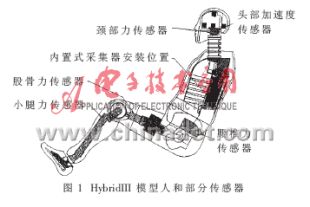
圖1顯示了HybridⅢ假人身上的部分傳感器的安裝位置,傳感器總的測量通道數可超過200個,常用的有20多個。從圖1可知,假人胸腔中脊柱兩側有兩個空間,可以利用這兩個空間,各安裝一個內置式數據采集器。
?
?
1.2 總體結構
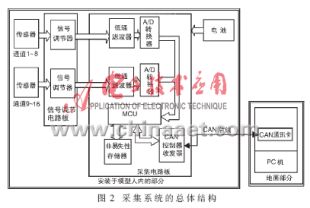
采集系統的總體結構如圖2所示,系統分為地面部分和安裝于假人內的部分。從假人各部位傳感器來的信號送入信號調節電路板,經信號調節電路轉換成電壓信號,輸出至采集電路板,經過低通濾波,然后轉換為數字量存儲在采集電路板的非易失性存儲器中。采集電路板采用了2個14位的A/D" title="A/D">A/D轉換器,擁有16個獨立的采集通道,每通道采樣頻率為10kHz。
?
?
試驗后可以通過CAN總線把采集到的數據讀出送至PC機進行分析處理。之所以采用CAN總線,首先,除了它的數據傳輸速度(最大1Mbps)比較快以外,更主要的是極易擴展測量通道。試驗中可以通過CAN總線把多個試驗假人連接起來,再與車載的采集器連接起來,構成一個分布式的采集系統。利用CAN總線實時性和可靠性好[3]的特點實現不同假人之間以及假人與車載采集器之間所有通道的同步采集。根據以前的試驗數據,假人一般在汽車碰撞發生20ms后才開始移動,這段時間已經足夠實現同步信號的發送和接收,此后既使發生斷線,也不會影響采集;此外,CAN的各個節點地位相同,為無主式結構,便于PC機與多個采集器通信,試驗時,去掉PC機也不會影響其它節點;最后,可設置其中一個節點為觸發節點,通過CAN總線來觸發其它采集節點或安全氣袋控制器節點。
2 采集器硬件設計
由于安裝空間的限制,簡化硬件設計并滿足多通道、高采樣頻率是關鍵。
2.1微控制器單元和數據存儲
為了縮減采集電路板的尺寸,就要采用功能強的控制器。控制器功能強,外圍電路設計就可以簡化。本文選用MOTOROLA公司的MC68HC812A4單片機作為控制器。這種單片機屬于MC68HC12系列,是一種新型的16位單片機,速度快而時鐘頻率低,具有較強的抗干擾能力和可靠性。
因為通道數比較多,采樣頻率也較高,因此采集電路板要有足夠的數據存儲空間。MC68HC812A4單片機有比一般16位單片機大得多的尋址空間(大于5MB)。MC68HC812A4單片機內部雖然也是16位地址總線,但外部有22條地址線。其內部的16位地址總線決定內部只有64KB的地址空間。但當其工作在寬擴展模式時,內部64KB的地址空間分別劃出16KB、4KB和1KB三塊,分別為程序窗口、數據窗口和E窗口。通過窗口和該窗口的頁面地址寄存器(8位),把實際的存儲器空間分為256頁,分別稱為程序頁面、數據頁面和E頁面,如圖3所示。這樣,當單片機工作在寬擴展模式時,有大于256×(16KB+4KB+1KB)=5376KB的尋址空間,可以很好地滿足大容量數據存儲的要求。
?

?
試驗過程中采集到的數據,必須可靠地保存起來,數據存儲器采用NVRAM,普通SRAM加鋰電池構成,具有掉電后依然保持數據的功能,以增強數據存儲的可靠性。
2.2 信號采樣和模/數轉換
選擇采樣和模/數轉換芯片,考慮的主要指標是模/數轉換速率和芯片集成度。經過細致比較,本文選擇了模/數轉換器MAX125。它的優點是擁有8個采集通道,這8個采集通道分為A、B兩組,兩組公用4個采樣保持器。這樣可不再使用單獨的采樣保持器,大大減少了元件數量。但它的最大轉換速率只有250kHz,需要精心設計轉換方式才能滿足同步和每個通道達到10kHz采樣頻率的要求。
為此,采用雙MAX125分步操作同步轉換的方式。
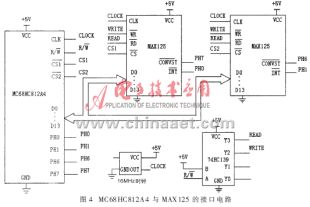
圖4中給出了兩個MAX125與MC68HC
?
?
812A4的接口電路。兩個MAX125都連接在數據總線上,它們分別占據不同的地址空間。單片機對某一空間地址進行讀寫操作時,其片選管腳CS1或CS2會選通相應的MAX125,并讀出或寫入數據。為了同步時序,兩個MAX125與MC68HC812A4單片機使用同一個時鐘源。
向MAX125寫入控制字" title="控制字">控制字能控制它對A組還是B組進行轉換,也能控制是只轉換該組一個通道還是四個通道都轉換。例如寫入0011是對A組四個通道進行轉換。
單片機采用查詢方式工作。工作時,首先分別向兩個MAX125寫入控制字,對哪一組哪幾個通道進行轉換。然后令單片機PH口的PH6和PH7管腳各輸出一個低脈沖,這兩個低脈沖的上升沿同時啟動兩個MAX125工作。在MAX125內部,需要模/數轉換通道的信號先被采樣保持;然后依次被模數轉換,轉換結果保存在寄存器中;其后MAX125的INT管腳變為低電平。轉換過程中,單片機通過PH0管腳和PH1管腳不斷查詢兩個MAX125的INT管腳狀態,一旦有一個變為低電平,就連續讀出轉換的數據;然后繼續查詢另一個INT管腳狀態,若為低電平,也連續讀出轉換數據。
前一組通道轉換的數據讀出、存儲完畢后,再向兩個MAX125寫入控制字,對另一組通道進行轉換。
采用這種方式,兩個MAX125的A組8個通道實現了完全同步采集,B組8個通道也是完全同步采集。A組B組之間約有25μs的時差,但滿足同步時差小于100μs的設計要求。
圖5是MC68HC812A4與MAX125的接口時序。其中E clock為MC68HC812A4單片機的總線時鐘,時序圖只畫到單片機第一次讀取轉換結果為止。
?

?
可以計算出,A/D轉換是整個采集周期中最耗時的時間段,向兩個MAX125寫控制字和讀取存儲轉換結果的時間加起來也不及A/D轉換時間。采用同步啟動轉換方式,兩個MAX125的A/D轉換是并行的。因此,采用分步操作同步轉換的方式大大提高了系統的采樣頻率。
2.3 信號適配電路
假人身上傳感器類型不同,輸出的信號也各異,要有相應的信號適配電路把它轉換成一定幅值的電壓信號,然后經過抗混濾波器濾波,才能進行A/D轉換。這里,抗混濾波器采用了固定頻率低通濾波,而在數據后處理中用數字濾波的辦法來滿足不同通道的不同頻率等級的濾波要求。
這里重點介紹力傳感器適配電路的設計。力傳感器實際上是4個接成全橋的應變片。測量前一般要對傳感器的電橋進行調零,否則電橋輸出的不平衡電壓,經放大后會造成很大的零漂。通常的動態應變儀結構復雜,體積龐大,不能安裝到假人內部,因此要設計一個可程控調節的動態應變儀。
本文采用集成調節芯片MAX1457作為信號適配芯片。MAX1457內部有一個可程控調節增益的放大器,另有5個數模轉換器,輸出的模擬量與放大器的輸出疊加,可以對傳感器的零漂、輸出幅值、溫漂以及非線形進行調節補償。試驗前,先要針對某個力傳感器在不同溫度下進行補償設置。
MAX1457通過SPI接口外接一個EEPROM來存儲補償因子。單片機同樣通過SPI接口來讀寫EEPROM。
2.4 通訊電路
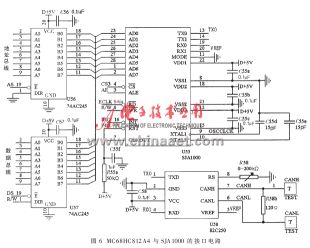
數據通訊采用CAN總線通訊方式。本文采用PHILIPS公司的獨立CAN控制器SJA1000。這種控制器既可以與INTEL模式的單片機接口,又可以與MOTOROLA模式的單片機接口。但SJA1000的8位地址和數據線采用復用方式,而MC68HC812A4單片機的地址線和數據線是完全分開的,這樣就要設計一個接口電路,把單片機并行的地址信號和數據信號轉換成串行的地址數據信號以滿足SJA1000的讀寫要求。
接口電路見圖6,使用兩片74AC245總線收發器,用來控制單片機的地址線和數據線在不同時間段與SJA1000的地址數據復用線導通。SJA1000的輸出信號經82C250收發器連接到CAN總線上。74AC245的導通和SJA1000所需的控制信號由另外的時序控制電路產生。
?
?
3 采集器軟件設計
MC68HC812A4單片機內部有4KB的EEPROM,充分利用這塊空間,可以不用片外EEPROM,從而減少元件數量。為此,單片機復位時,令其工作在單片模式,此時4KB的EEPROM位于64KB內部地址空間的最頂部,程序、復位向量、中斷向量都可以寫在這里;然后更改單片機模式寄存器內容,使單片機工作于寬擴展模式,此時外部的地址數據線可用,而內部4KB的EEPROM仍保持原來的地址空間不變。
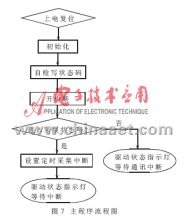
程序按功能分為主程序、采集子程序和通訊子程序三塊。采集器上電復位后,進入主程序,主程序先初始化、自檢,然后進入相應工作狀態,流程圖如圖7所示。
?
?
其中,初始化包括設置單片機的工作模式,設置外部總線狀態,設置存儲窗口,設置看門狗狀態,設置各I/O口狀態以及設置SJA1000寄存器等。自檢主要檢查NVRAM內容并保存自檢狀態碼。系統根據狀態碼決定進入何種工作狀態:一是進入等待通訊狀態,當CAN總線上發來命令碼,SJA1000產生接收中斷,系統進入通訊子程序解釋并執行命令碼;二是進入等待數據采集狀態,設置采集中斷發生的時間間隔,并等待采集中斷。采集中斷子程序每隔設定的時間間隔執行采集16個通道的信號一次,流程圖如圖8所示。這種狀態下,也可響應通訊中斷。
?

?
4 上位機軟硬件設計
上位機部分采用HK-CAN20C通訊卡。這種通訊卡插在PC機的ISA插槽上,使用CAN2.0A協議,最高數據傳輸率為1Mbps,其Win98下驅動程序提供了7個函數接口。本文用VC++6.0開發環境,編寫了Win98下的通訊程序THDAS。通訊時,先調用InstallCANDriver()初始化通訊卡,初始化成功返回0;然后可調用SendCANFrame()/ReadCANFrame()發送/接收幀;通訊結束,則調用UninstallCANDriver()釋放驅動程序占用的系統資源。
本文介紹的安裝于假人內部的數據采集器是汽車碰撞試驗分布式數據采集系統的一部分。在碰撞試驗中采用分布式采集方式,不會因為一臺采集器失靈而導致試驗完全失敗,降低了試驗風險,同時又能保證所有采集通道的同步性。因此,美、德等汽車工業發達國家均把采用現場總線技術的分布式數據采集作為碰撞試驗電測量技術的發展方向。
?
參考文獻
1 MOTOROLA, INC. MC68HC812A4 Advance Information,2001
2 MOTOROLA, INC. CPU12 Reference Manual ,2000
3 鄔寬明.CAN總線原理和應用系統設計.北京:北京航空航天大學出版社,1996
4 Data Sheet SJA1000. Philips Semiconductors. 2000