
O 引言
GPS系統的精密定位服務(PPS)不對外開放,普通用戶只能使用C/A碼的標準定位服務(SPS),雖然美國政府已經取消實施選擇可用性(SA)政策,采用C/A碼的GPS接收機定位精度可以達到25 m(95%置信度,二維水平平面誤差),但仍然滿足不了某些系統的需要。差分GPS技術可以提高實時定位精度,得到米級,甚至亞米級的定位精度。國際海事無線電技術委員會(RTCM)于1983年為差分GPS業務設立了SC-104專委會,以論述用于提供差分GPS業務的各種方法,并制定數據格式標準。目前各GPS廠家生產的GPS接收機,除了編制自己的專用格式外,基本上都具有接收符合RTCM SC-104標準格式的差分數據接口,且接收機價格在GPS競爭激烈的今天已日趨合理。又由于目前能發送RTCM SC-104電文的差分GPS基準站都是國外廠家生產的,價格昂貴,高達幾萬至十幾萬元,而GPS-OEM(原始設備制造商)板的價格便宜,不足千元就能買到,使用起來也比較靈活,利用GPS-OEM板設計的DGPS基準站同樣可以達到較高的定位精度,所以具有很大的實用價值。
1 偽距差分GPS原理
偽距差分GPS具有精度高等諸多優點,是目前用途最廣的一種差分GPS技術,RTCM SC-104標準和幾乎所有GPS接收機的差分定位均采用這種技術。在偽距差分GPS系統中,基準GPS接收機可精確地求出基準站的地心坐標,并收集全部衛星的星歷文件,計算出每一時刻所有可見,星的地心坐標,從而得到各個衛星到基準站的真實距離Rj,同時基準GPS接收機測量出全部可見衛星的偽距![]() 為:
為:

式中:△tb為基準站接收機鐘差;![]() 為衛星星歷誤差和衛星鐘差;
為衛星星歷誤差和衛星鐘差;![]() 為電離層延遲;
為電離層延遲;![]() 為對流層延遲;
為對流層延遲;![]() 為多徑效應延遲;vb為接收機測量誤差。測量出的偽距包含各種誤差,與真距不同,此誤差就是偽距修正數:
為多徑效應延遲;vb為接收機測量誤差。測量出的偽距包含各種誤差,與真距不同,此誤差就是偽距修正數:
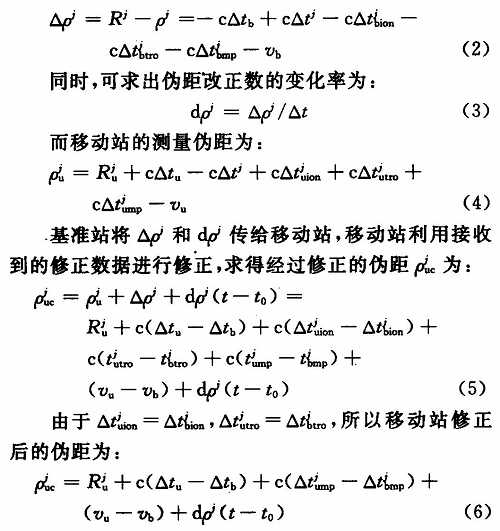
從式(6)可以看出,修正后的偽距基本消除了衛星星歷誤差、衛星鐘誤差、電離層延遲和對流層延遲、移動站接收機利用該修正后的偽距進行定位解算,可以得到更精確的定位結果。
差分GPS基準站就是完成所有可視衛星差分修正數和修正數變化率的解算,并按照RTCM SC-104標準格式廣播給一定范圍內的用戶,使其得到更高的定位精度。
2 RTCM SC-104電文及其編譯
RTCM電文是由若干個二進制的字組成,每30 b字分為5個6 b的字節,其中前4個字節用來傳輸差分數據信息,第5個字節用于奇偶校驗,以便用戶檢驗接收到的數據是否正確。RTCM電文采用6/8(1~6,1為最低有效位)進行數據傳輸,第7位為標志位,設置為1,第8位設置為空格。這種編碼規則對RTCM字節而言在64~127之間有效,因為二進制的1000000相當于十進制的64,二進制的1111111相當于十進制的127,凡大于127和小于64的字節對RTCM均無效。
RTCM電文可在標準計算機通用異步收發機UART間串行傳送,由于UlART為約定的非同步通訊,首先發送和接收最低有效位,每一個字節在發送前要完成“滾動”,這在效果上保持了RTCM電文的邏輯序列,這樣在發送媒介中最高有效位優先。假設一個字節用d1,d2,d3,d4,d5,d6表示,則滾動的含義是d1和d6,d2和d5,d3和d4進行互換。
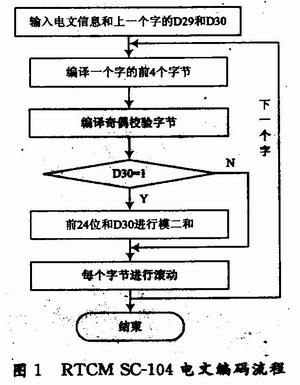
根據前述內容,整個編碼過程大致可歸納為:
(1)獲取電文信息內容。包括電文類型以及該項電文必須包含的信息內容,因為每種電文的格式由于其傳輸的內容不一樣將導致其具體的格式也不盡相同。
(2)編譯每個字的前4個字節的內容。編譯每個字前4個字節時,首先必須清楚這4個字節中包含的電文信息內容,同時必須清楚每種信息所占的比特數和所在的位置,按所在的位置順序進行編譯。
(3)編譯每個字的第5個字節,即奇偶校驗碼。前面4個字節的內容編譯好之后,按奇偶校驗算法編譯第5個字節的內容,同時必須保留這個字節的最后兩位數值,用于后一個字的編碼。這是RTCM電文編碼中很重要的一部分,能使用戶對所接收到的信息進行檢驗。
(4)對前4個字節的每一位與前一個字的最末一位進行模二和。模二和是二進制中的一種加法,但不采取進位。
(5)完成對每個字節的滾動。在完成對各個字節的滾動后,電文就可以通過電臺發送給流動用戶。
上文所講的是對RTCM電文一個字的編碼步驟,對RTCM的某一種電文而言,首先是編譯電文頭,然后編譯電文的主體部分。圖1是整個編碼程序流程圖。
3 基于Garmin GPS-OEM模板的DGPS系統設計
美國Garmin公司生產的型號為GPS25LP和GPSl5L的GPS接收機OEM板均是12通道的C/A碼單頻接收機。GPS25LP有2個RS 232串行數據通信接口,分別提供ASCII碼導航電文輸出和二進制的原始測量數據輸出,GPS25LP接收機在經過正確的設置后,可以作為基準站GPS接收機使用。GPSl5L接收機可以通過串口2接口輸入實時差分改正數據(RTCM SC-104信息類型1,2,3,7,9),可以作為移動站使用。利用兩個GPS-OEM模板和其他相關設備可建立簡易的差分GPS定位系統,其系統結構如圖2所示。
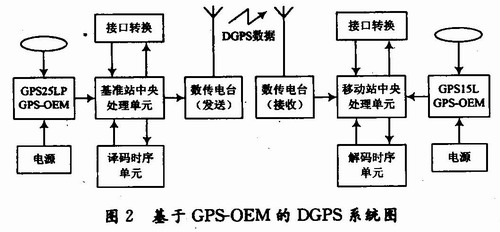
GPS25LP-OEM作為基準站時,主要完成星歷數據與基準站GPS測量數據的接收;基準站中央處理單元完成差分改正數的計算以及RTCM SC-104電文格式的編碼;數傳鏈路完成差分數據的發送與接收;移動站GPSl5L-OEM完成電文格式的解碼,結合實時接收的GPS測量數據生成高精度的GPS定位信息。
4 試驗結果
在天線靜態固定位置處(經度1:28.232 068°;緯度1:112.991 309°,高度1:78.460 089 m;經度2:28.232 075°,緯度2:112.991 282°,高度2:84.728 061 m)用GPS25LP和GPSl5L建立的差分系統和HemisphereHCl2-A差分系統同時觀測近10個小時的GGA數據。
自建簡易差分系統的經度,緯度,高度與時間的統計圖如圖3所示。

用北京合眾思壯公司的GGA Parse 5.5解算軟件得出以下試驗數據對比,如圖4,圖5所示。
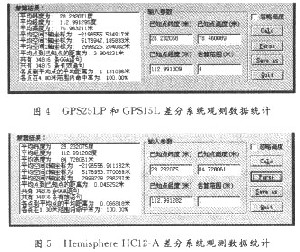
從統計圖和軟件解算坐標數據中可以看到,自建簡易差分GPS系統的定位精度可以保持在4 m以內。
5 結語
通過相關理論分析可知,采用偽距差分定位可以消除衛星時鐘誤差、軌道參數誤差、電離層效應誤差、對流層效應誤差等公共誤差,剩下的目標載體距離測量誤差主要來自接收機本身的通道、噪聲和地面多效應以及衛星信號傳播路徑不盡相同而殘存的部分傳播環境誤差。通過實驗結果驗證了分別使用GPS25LP和GPSl5L作為差分基準站和移動站建立的差分測量系統具有較高的定位精度,能夠為許多精確測量提供米級精準度的定位信息;并且這種DGPS測量系統性價比非常高,具有很高的使用價值。