
摘? 要: 對實施被動無源測向定位的主要工具之一的相位干涉儀進行了較為詳細和系統的研究,給出了一維相位干涉儀的基本關系式,分析了五通道相位干涉儀測向定位算法及其性能指標,對解相位模糊問題進行了探討。最后,在高速浮點信號處理" title="信號處理">信號處理器" title="數字信號處理器" title="數字信號處理器">數字信號處理器">數字信號處理器TMS320C6711系統上實現了五通道相位干涉儀測向定位算法,達到了性能指標及實時實現。
關鍵詞: 相位干涉儀? 測向定位? 相位模糊? 定位誤差? 實時處理
相位干涉儀測向技術廣泛應用于天文、雷達、聲納等領域。將干涉儀原理用于無線電測向始于上世紀五十年代和六十年代,隨著數字信號處理器的出現,通過數字信號處理器來實現高精度實時測向成為可能。
本文在對一維和二維相位干涉儀進行研究的基礎上給出了五通道相位干涉儀的基本關系式,分析了測向精度,并對解相位模糊問題和信道校正問題進行了探討。采用多基線五元圓形天線陣" title="天線陣">天線陣列為模型,由天線陣列接收到的信號求解出五元天線陣列的互相關信號,并由此提取測向所需的方位信息。本文以五通道相位干涉儀硬件實現為目標,采用高速浮點數字信號處理芯片TMS320C6711進行測向處理。
1 相位干涉儀測向原理
1.1? 一維相位干涉儀測向原理
圖1所示為一個最簡單的一維雙陣元" title="陣元">陣元干涉儀模型。圖中,間隔為d(d稱為基線)的兩根天線A1和A2所接收的遠場輻射信號之間的相位差為:

?
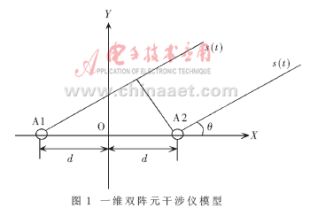
式(1)中,λ為接收電磁波的波長。因此,只要測量出φ,就能算出輻射源的到達方向θ:

1.2 測向誤差的分析
在實際系統中,兩根天線A1和A2接收的信號為:
?? 
其中,ni代表對應陣元i接收的噪聲,兩陣元的噪聲統計相互獨立,且與信號統計獨立。
兩個陣元接收信號的互相關為:

式中,E代表數學期望運算,“*”代表復共軛運算,Ps代表信號功率,相關以后噪聲得到抑制。
由(4)式有:

式中,arccos表示反余弦函數,arg代表復數取幅角運算,區間為[-π,π]。k為整數,且滿足:

在(6)式中,當d/λ>0.5時,k的取值不唯一,θ有多個解,由此產生測向模糊。
對(5)式求導,有:
??? 
由(7)式可以得出以下結論:sinθ越大,即方位角" title="方位角">方位角與干涉儀法線方向的夾角越小,測向精度越高;反之,測向精度降低,直至測向無效。當θ=±90°(即信號從干涉儀法線方向入射)時,精度最高;θ=0°或180°(即信號從干涉儀基線方向入射)時, 接收信號互相關的幅角arg(r21)反映不出方位角的變化,測向無效。但單基線干涉儀不能同時測量俯仰角和方位角,此時至少需要另一條獨立基線的干涉儀對測得的數據聯合求解。
1.3 二維干涉儀測向原理及去模糊處理
1.3.1 多基線五元圓形天線模型
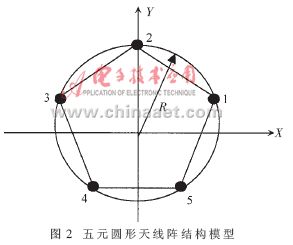
??? 五通道相位干涉儀采用寬口徑、多基線的五元圓形天線陣,五邊形的五個陣元均勻分布在半徑為R的圓上,五個陣源分別為1、2、3、4、5,如圖2所示。天線陣平面與地面平行,測得的方位角θ為以天線到地面的垂足為原點,目標在地面上的方位角。測得的俯仰角φ對應于目標到原點的距離(俯仰角0°對應原點)。
兩個陣元接收信號之間的互相關為:
??  ??
??
?
??? 方位角θ和俯仰角φ的具體計算如下:
??? 
?
式中,i=1~5,令r56=r51、r67=r12、r78=r23、r89=r34;atan2(y,x)代表四象限求反正切函數;arcsin代表反正弦函數。k1、k2為整數,且滿足:

在課題給定的條件下,最大俯仰角為60°。在俯仰角大于28°的情況下,可能出現模糊。
1.3.2 去模糊處理
為了消除測向模糊,采用多組基線測向,各組基線得出的解的交集即為真實方向。對于本文研究的多基線五元圓形天線陣,當有信號入射時,每組基線均可得到一組測量值。設為:
(34,51): (θ11,φ11)、(θ12,φ12)…
(12,34): (θ21,φ21)、(θ22,φ22)…
(45,12): (θ31,φ31)、(θ32,φ32)…
(23,45): (θ41,φ41)、(θ42,φ42)…
(51,23): (θ51,φ51)、(θ52,φ52)…
以上五組值中,只有真實方向才會每次都出現。取五組值中數值最相近的一對角度,即可得到真實方向。
2 測向算法的硬件調試及仿真
由于需要對五通道輸入信號做相關運算和角度運算,計算量大且多為浮點運算。這里采用TMS320C6711芯片為核心組成硬件系統數字信號處理單元,并在該硬件系統上完成了五通道相位干涉儀算法仿真研究。
2.1 TMS320C6711和TDS510USB-E的特點
TMS320C6711是TI公司于1997年推出的DSP芯片。C6711片內有8個并行處理單元,分相同的兩組,C6711的體系結構采用VLIW結構,單指令字長為32bit,8個指令組成一個指令包。芯片內部設置了專門的指令分配模塊,可以將每個256bits指令包同時分配到8個處理單元,并由8個單元同時運行。芯片內部時鐘頻率可以達到150MHz,芯片最大處理能力可達到1200MIPS。
TDS510USB-E是以TMS320C6000為核心的硬件調試系統。仿真器為USB2.0接口設備。
2.2 測向處理器硬件設計
????測向處理器硬件框圖如圖3所示。
?
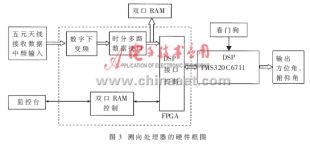
????數字下變頻單元輸入5通道接收機接收的信號,并去掉載波的零中頻I、Q信號(5通道共10路I、Q信號)。
FPGA包括數字下變頻單元、時分多路數據接口、DSP的EMIF接口控制及雙口RAM控制四大模塊。
雙口RAM存儲測向處理所需數據,考慮到DSP中測向算法所需要的內存容量,因此其不少于10K。
2.3 測向算法軟件的實現
CCS是TI的集成性DSPs軟件開發工具。在一個開放式的插件結構下,CCS內部集成了C6000代碼產生工具、軟件模擬器、實時基礎軟件DSP/BIOS等軟件工具。在CCS下,開發者可以對軟件進行編輯、編譯、調試、代碼性能測試和項目管理等所有工作。選擇C語言作為應用程序的設計,是因為C6000中采用優化ANSI C編譯器,它的輸入是C語言源代碼,輸出為TMS320匯編代碼。即將符合ANSI標準的C代碼轉換為目標DSPs的匯編代碼,一般的算法可采用C代碼實時實現。
五通道干涉儀測向算法軟件流程圖如圖4所示。
?

2.4 五通道相位干涉儀算法的硬件調試及仿真結果
???在透徹分析五通道相位干涉儀算法原理的基礎上,依據軟件工程的原則規范,采用C語言設計出了五通道相位干涉儀算法的軟件,然后在PC機上用C6711的C編譯器編譯、匯編、鏈接了軟件的C源代碼,最后將軟件加載到目標板上進行運行、調試。
2.4.1 測向處理器中數據的來源
五通道送入TMS320C6711的數據由科學計算語言Matlab6.2在WINDOWS2000操作平臺上仿真得出,即采用模擬QPSK信號,調制速率為9600bps,噪聲是 Matlab6.2內部函數randn產生的高斯白噪聲,并用Hilbert變換將其變換為復噪聲。
采樣信號長度:512點
信噪比:5dB、10dB
仿真頻點:1800MHz
2.4.2 硬件調試結果
表1、表2、表3分別列出了幾種情況下待測俯仰角和方位角與CCS中得到的俯仰角和方位角的對比。其中,phai、theta分別表示待測俯仰角與方位角,phai測量值和theta測量值是由運行CCS2.1中的測向程序得到的。
?



運行結果表明,五通道相位干涉儀測向信號處理的硬件實現是可行的。當俯仰角大于28°時,用前面所述的去模糊方法,可以完全消除由于模糊帶來的角度不確定問題。當仿真數據中不加入噪聲時,該硬件系統的輸出結果與真實值基本吻合。信噪比對測向性能的影響較大。
在CCS2.1環境中,采用盡可能優化的干涉儀法測向定位程序,用CCS2.1提供的記時工具CLOCK測量執行時間,從仿真數據輸入到確定出信號方向的時間約為7ms,基本達到了實時信號處理的要求。
??? 以上所做的硬件調試是在用仿真語言MATLAB對五通道相位干涉儀測向算法在天線誤差、信道幅度及相位誤差存在的條件下進行仿真驗證的基礎上進行的,在硬件調試中側重對測向算法的驗證。硬件調試運行結果表明五通道相位干涉儀具有噪聲可抑制、靈敏度高、線性范圍大、測向響應時間快等優點,這些優點使得單信號環境下的相位干涉儀測向機制更具有優勢。同時,五通道相位干涉儀算法的硬件實現也為工程上實現新一代電子測向系統打下了堅實的基礎。
?
參考文獻
[1] W.D.斯坦利.數字信號處理.北京:科學出版社,1979
[2] 張賢達,保 錚.通信信號處理.北京:國防工業出版社,2000
[3] 趙淑清,鄭 薇.隨機信號分析.哈爾濱:哈爾濱工業大學出版社,1999年
[4] 陳亞勇.MATLAB信號處理詳解.北京:人民郵電出版社,2001年
[5] 龐偉正.高分辨測向算法對三種信號源測向精度及分辨率的分析與模擬.雷達與對抗,1996(4):1~5
[6] 李 卿. 二維數字化瞬時測向技術.電子對抗,1982;(7):58~75