
重礦行業是典型的裝備制造業,它的生產設備組成相對較為分散,設備現場環境較為惡劣,不易控制。傳統的工業控制器只是對現場的設備進行監控,如果設備運行異常則關斷設備,這樣就大大降低了生產效率。而且,隨著設備結構及其控制的日益復雜化,在控制的過程中可能存在不同的網絡協議、不同的操作系統以及不同的編程語言。在實現它們相互之間通信的時候,需要將格式和協議進行轉換,這就給我們開發控制器帶來了諸多不便。CORBA技術具有良好的跨平臺互操作性、可移植性、可擴展性和編程語言無關性,解決了異構平臺的對象互操作問題。它屏蔽了底層的通信機制,采用面向對象的方法以提供分布式應用軟件的可重用性和可擴展性,實現了異構環境下通信.這樣既大大簡化了分布式應用系統的開發和維護,又便于異構環境下的系統集成,從而可以滿足未來系統擴展的需要。本文就是以制造業嵌入式控制器為背景,在所選擇的嵌入式硬件和實時操作系統的基礎上,開發基于CORBA技術的面向重礦行業的嵌入式控制器。
1、CORBA技術簡介
CORBA(Common Object Request Broker Architecture)是國際對象組織OMG發起和制定的分布式對象的規范,它將分布計算與面向對象的概念相結合,提高了軟件重用率,控制冗余度等;引入Broker的概念并通過ORB 機制可以完成遠程對象的激活,而不管實現這些對象所使用的平臺和技術;客戶方程序和服務方程序的完全分離,客戶僅僅通過代理和服務器發生關系,使客戶與服務器之間的關系更加靈活。另外,CORBA 還為對象管理提供了一組對象服務,如名錄服務、事件服務、永久對象服務、安全服務和查詢服務等,為分布式應用的開發提供了強有力的保證。
CORBA規范定義了客戶程序與服務程序中的對象如何進行通信的機制。對象請求代理ORB負責處理它們之間的通信。ORB提供了支持分布式處理的機制:為請求查找具體的對象實現,讓對象實現作好接收請求的準備,傳送構成請求的數據等。客戶所看到的接口完全獨立于對象所在的物理位置, 實現對象的編程語言, 以及在對象的接口中沒有反映出來的其他特性。CORBA通過IDL程序框架或動態程序框架來定位相應的實現代碼、傳送參數以及對對象實現的傳送控制。
2、基于CORBA技術的嵌入式控制器的實現
2.1 系統概述
我們開發的是基于CORBA規范的開放的可移植、可裁減、可擴展的適合重礦行業不同層次設備的嵌入式控制器。考慮到重礦行業的特點,設備控制的復雜性,沒備組成生產系統時設備相對較為分散,設備現場環境較為惡劣。通過建立控制器嵌入式軟、硬件系統平臺,設備和控制器可以通過無線或有線的網絡進行連接,并且可以和監控計算機進行通訊。通過遠程監控模塊,使監控人員可以在控制室對整個加工線的情況進行監視,減少了不必要的設備關斷現場觀測,極大地方便了人工操作。這樣通過研究礦山開采加工中的問題,優化工藝參數和系統之間的協同工作,就可以提高質量、降低能耗、減少廢棄物提高礦石的利用率、提高設備的可靠性和效率。
2.2 系統總體設計
整個控制器包括應用層和系統層。系統層包含硬件和相關的實時操作系統以及應用平臺,應用層包含運行于應用平臺上的各類功能模塊。其總體框架如圖1所示。

圖1 控制器結構框圖
通過嵌入式控制器不僅可以實現整個成套線的集成控制和管理,而且可以采集相關設備的運行參數,進行集中監控和預測。
2.2.1 基于CORBA技術的軟件平臺
本系統在所建立的面向重礦行業設備的控制器系統層上構建一個基于CORBA協議實時中間件的應用平臺,為在該平臺上的標準化應用模塊提供支持。
中間件產品采用華盛頓大學對象管理組織的CORBA產品—TAO,TAO使用了ACE中提供的框架結構對象與模式,實現了針對高效與實時系統的中間件架構。當前的TAO版本基于CORBA2.6規范,它包含了網絡接口、操作系統、通信協議以及CORBA中間件對象以及相關特性,并且進一步改善了高效性和實時性等。
2.2.2 開發適合重礦行業的應用模塊
重礦行業礦山設備控制有其獨特的特點, 目前設備的控制相對數控機床來說比較簡單,沒有復雜的軌跡控制,但對加工時的智能優化和邏輯控制有很高的要求。隨著地質條件的變化、對礦石產品的篩選要求增加,新型生產工藝的產生,增加了控制的復雜性,設備組成生產系統時設備相對較為分散,設備現場環境較為惡劣,基于這些特點研究在上述CORBA協議框架下的應用程序模塊,將這些人機交互、邏輯控制、運動控制、智能過程控制、通訊服務等模塊形成標準化的可裁減的應用對象模塊。具體模塊如下所示:
1)狀態采集模塊。根據不同產品監控對象數據采集的不同,構建不同的數據采集模塊。包括數據采集硬件以及數據采集、記錄、傳送軟件。例如,針對振動的采集模塊,振動壓力的采集模塊,振動溫度的采集模塊等。
2)監控模塊。監控模塊包括嵌入式控制器上的應用模塊以及遠程PC平臺上的分析模塊。例如,針對單錘破的監控模塊可能就包括對軸承的監控,通過對軸承的不同采集點采集數據的分析進行設備的狀態分析,實現監控。遠程計算機上也可以通過標準的監控模塊對該設備進行有效的監控,實現故障預警。
3)過程控制模塊。過程控制模塊可以對于采礦成套線上的多個設備的控制來實現設備的協調運行和效率的提高。
4)通訊服務模塊。通過通訊模塊可以將現場采集的各種數據(如溫度、轉速、震動等)傳輸到監控室,便于工作人員對設備運行狀態進行實時監控,提高效率,減少故障發生率。另外,根據需要,可選視頻圖像采集與壓縮模塊,將現場圖像等多媒體信息采集下來,通過通訊模塊進行傳送,為工作人員提供直觀的現場運行場景顯示。
控制器的網絡化應用和遠程監控服務的結構見圖2。
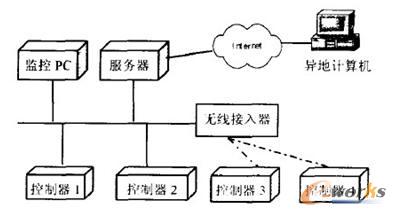
圖2 控制器分布式應用框圖
在現場各個設備上的控制器可以獨立工件,也叮以通過有線或無線的網絡連接起來,可以形成一個監控剛絡,部分控制器可以選擇視頻采集功能,通過通訊網絡把圖像傳遞到監控PC上,甚至可以通過服務器和Internet向異地計算機進行圖像傳遞:控制器和監控PC的無線傳輸通過連接九線模塊進行,無線數字收發模塊負責信道估計、補償、信號檢測與基本的差錯控制(如出錯重傳,前向糾錯等)。
服務器和Internet的連接也是多種方式:電話、ADSL、GSM或CDMA等,服務器完成數據采集、存儲與管理,根據異地計算機的要求,形成相應的、基于Web的表單和多媒體流信息,并向遠程調用者發布。同時,可以根據異地計算機的指令,對設備監控人員發出操作命令。
2.2.3 實時操作系統
分布式控制器將采用國產的ReWorks操作系統。ReWorks是中國電子科技集團第32所(華東計算技術研究所)自主研制的嵌入式實時操作系統和集成開發環境,它是一個集設計/開發/調試/仿真于一體的實時嵌入式系統開發與運行平臺,兼容于VxWorks的嵌入式實時操作系統。
2.2.4 嵌入式系統硬件設計
考慮到系統的開放性,系統硬件選擇X86 CPU 系統,采用成熟的All-in-013e主板,并支持104總線。硬件體系結構如圖3所示。
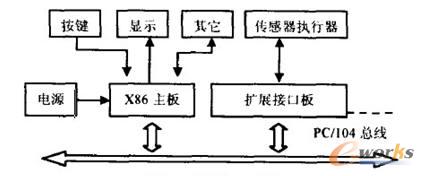
圖3 硬件體系結構
3、結束語
基于嵌入式系統的分布式設備控制器主要面向重礦行業的設備控制,提取這個行業控制系統的標準控制模型和控制方式,研究典型的工藝過程和智能優化控制的方法,研制具有開放性的面向重礦行業的嵌入式控制系統,并在實際的破碎機控制器中進行調試和應用,從而形成具有知識產權的控制器。這種控制器的研制成功不僅對提升我國重礦行業的技術水平具有很大的意義,而且其本身具有的開放性又可以推廣應用于其他行業,控制器本身采用了標準化的軟硬件系統,降低了用戶的購買和使用成本,具有良好的社會和經濟效益。