
有一個關于得克薩斯州民間英雄 Pecos Bill 的故事:那時,有人打賭他不能從從得克薩斯州的加爾維斯敦游過墨西哥灣到達弗羅里達州的基韋斯特。他訓練了一個月,當這一天到來時他便一頭扎進了墨西哥灣。Bill 不分晝夜地游了一個星期,期間戰鯊魚斗颶風。最終,他離自己的目標越來越近。然而,當他在海浪中看到遠處的基韋斯特時,他意識到他已經太累,無法再繼續向前游了,因此他轉身游回了得克薩斯!
致力于 CAN 通信的設計人員就像 Pecos Bill 一樣面對他們所遇到的種種挑戰,往返信號傳輸成為一個重要的考慮因素。
當一個以上節點要在共用總線上發送信號時,控制器局域網 (CAN) 協議的一個關鍵特性就是如何處理總線爭用問題。CAN 使用逐位仲裁 (bit-wise arbitration) 來選擇哪一個節點應該繼續信號傳輸。由于這些節點對每一個比特位進行監聽,并且必須服從于更高優先級的消息,因此它們的響應時間必須快到能夠在破壞下一個比特以前終止傳輸。如下面三種情況所述,這就對容許組件延遲和線纜長度以及可用信號速率構成了一些限制。
情況 1:無爭用正常 CAN 總線運行
通常每次只有一個節點要通過共用 CAN 總線通信。沒有一般性損耗的情況下,我們來討論一種二節點網絡,然后再將這種討論延伸至更多節點。圖 1 描述了其工作原理。首先,兩個節點都處于非占用狀態,因此總線上沒有差動信號,如(1a)所示。如果節點 A 開始通信,則其使用一個占用位啟動一個 CAN 消息。向 CAN 收發器發送的傳輸數據 (TXD) 輸入是一個邏輯 0,其命令差動驅動器在總線線路上生成一個差動信號,如(1b)所示。節點 A 的接收機感應到該差動信號,并在已接收數據引腳 (RXD) 上輸出一個邏輯 0。差動電壓根據 (1c) 和(1d) 所示雙絞線對的傳輸線路屬性進行傳輸。最終,差動信號到達節點 B,節點 B 的接收機也在 RXD 上輸出一個邏輯 0,如 (1e) 所示。這時,節點 B 注意到節點 A 已經開始一個 CAN 消息,這樣節點 B 便不會在節點 A 完成以前發起消息。
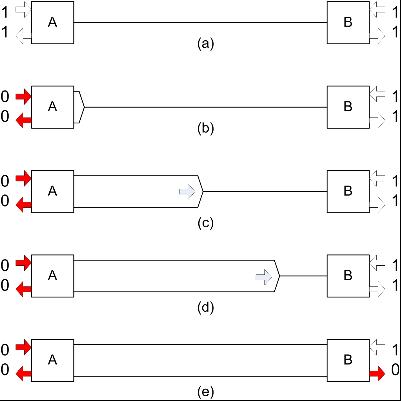
圖 1 A 到 B 的正常信號傳輸
需要注意的是,節點 B 并非馬上就知道節點 A 已經開始一條消息,因為從 A 到 B 的信號具有一定的延遲。這種情況下的總延遲為通過 A 處收發器(以及相關的隔離和緩沖電路)的延遲加上通過線纜的傳輸延遲,再加上 B 處收發器、隔離和緩沖電路的延遲的總和。乍一看,似乎這種單向延遲就是確保節點 B 不同節點 A 發送消息相沖突所需的關鍵計時限制。正如我們在情況 2 中所看到的一樣,這并非故事的全部。
情況 2:延遲爭用,后發消息具有更高的優先級
我們的下一種情況(圖 2)假設,節點 A 再次發起一條消息,但是節點 B 在稍后發起的一條消息具有更高的優先級。如前所述,這種情況以兩個節點均處在非占用模式作為開始,如 (2a 所示,隨后節點 A 變為占用(如(2b)所示)發起一條消息。該占用差動電壓再次沿線纜傳輸。在信號到達 B 處的收發器以前,該節點剛好利用如(2c)所示占用位發起一條消息。這時,兩個節點都正傳輸一個占用位,并且兩個節點都正接收一個占用位(如(2d)所示),然后兩個節點都沒意識到另一個節點也已啟用。由于在我們的假設情況中,節點 A 具有比節點 B 更低的優先級,因此有時節點 A 會通過將其 TXD 設置為 0(如(2e)所示)來發出一個非占用位。但是,由于節點 B 的作用,RXD 會感應到總線仍然處在占用狀態下。
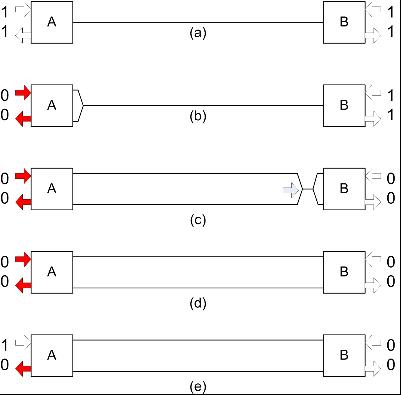
圖 2 延遲爭用—B 具有高優先級
通過研究某個具有實際延遲值的假設案例,我們可以更加具體地介紹這些計時要求。在我們的二節點例子中,設定總單向延遲為 200ns,信號傳輸速率為 1Mbps,也就是 ISO 11898-2 標準規定的最大值。這樣,位時間便為 1000ns。除節點 B 的第二位會是同節點 A 的消息優先級匹配的 0(非占用)以外,其同情況 2 所述一樣。(情況 2 中,節點 B 具有一個占用第二位,表明更高的消息優先級。)
圖 3 中,節點 A 在時間 t=0 時開始一條消息,從而在總線(b)上傳輸一個占用位。如圖 2 所示,其可能出現的情況是,節點 B 剛好在節點 A 的信號被接收到以前(c)開始發送,也即時間t=199ns。當時間 t=1000ns 的第二位開始之初,在節點 A 轉到非占用狀態以前兩個節點都沒意識到對方的有效性。然后,節點 B 在時間 t=1199ns 的第二位開始之初,轉到非占用狀態。另一個單向延遲以后,該非占用信號到達節點A,時間 t=1399ns。只有在這時,節點 A 才讀取 RXD 信號,并且可以確定其代表網絡的真實狀態。
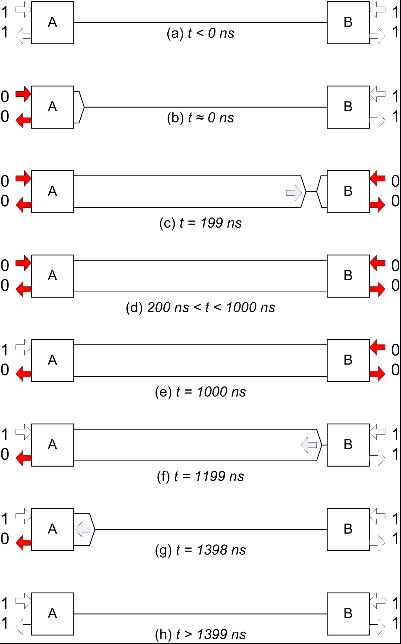
圖 3 延遲爭用—節點 A 和 B 具有相同的優先級
注意,只通過等到兩倍單向延遲(或者相當于總雙向傳輸時間)節點A才能判別這種情況,其中節點 A 和 B 的消息具有相同的優先級(情況 3),以及節點 B 的消息擁有更高的優先級。由于 CAN 協議固有的逐位仲裁機制,這種雙向延遲必須較好地位于一個位時間預算范圍內,也即 1000ns。否則,在第二個位仲裁完成以前,節點 A 就可能開始傳送其第三個位。
信號傳輸速率及線纜長度限制
我們知道雙向延遲至關重要,CAN 定義可編程傳輸延遲 (PROP_SEG) 為每個位的組成部分,以保證每個節點在對總線數據采樣以前都確實等待足夠長的時間。PROP_SEG 的計算涉及雙向延遲和本地系統時鐘頻率相關知識,其超出了本文的討論范圍。實際上,PROP_SEG 將采樣點規定在約總位時間的 5/6 或者更低以照顧其他段,這樣雙向延遲便被規定為位時間的一小段。
CAN 標準規定,線纜為 5ns 每米傳輸延遲,1Mbps 信號速率時最大線纜長度為 40 米。位時間為 1000ns 時,最遲采樣點(由PROP_SEG設定)約為 850ns。線纜本身具有 200ns 的單向延遲(即 400ns 雙向延遲),從而使收發器和相關電路的總延遲只剩約 450ns。
CAN 收發器的制造商通常規定“環路延遲”,其包括驅動器和接收機延遲。由于雙向計算中涉及兩個收發器,因此每個收發器都應有 225ns 或者更低的環路延遲,以支持 1Mbps 信號速率下 40 米的總線長度。如果收發器電路包括更多的組件,例如:隔離、電壓電平轉換或保護組件,則這些組件產生的延遲必須也包括在總延遲預算中。甚至,高速光耦合器一般具有 40ns 或更長的單向延遲,而全部雙向信號都必須通過四個光耦合器。這就極大地縮短了使用光隔離 CAN 系統的容許線纜長度(即增加了位時間)。1Mbps 條件下,即使快速光耦合器的延遲也會縮短容許線纜長度,計算方法如方程式 1:

下面顯示了信號速率和線纜長度之間的權衡因素,以及收發器延遲帶來的影響。收發器帶來的延遲(包括相關隔離、電平轉換和保護)對于 500 kbps 及以上的信號速率特別明顯。
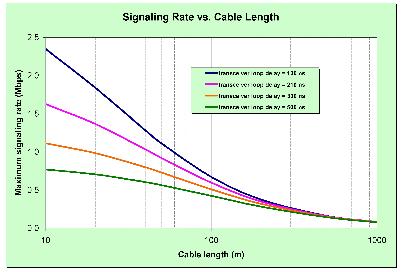
圖 4 收發器延遲影響信號速率和線纜長度的權衡(點擊圖片放大)
在單個封裝(ISO1050)中的高速 CAN 收發器集成 SiO2 隔離現已上市。利用低于 210ns 的極限總環路延遲(包括驅動器、接收機和兩個隔離信道!),您可以減少雙向環路延遲,并簡化您隔離式 CAN 解決方案的系統計時和設計。您還可以執行一個電平轉換功能,將一個 3.3V 控制器的電壓轉換至 5V CAN 收發器,無需更多的延遲。
當然,在進行信號速率和線纜長度相關性能優化設計時還存在其他一些問題。網絡的傳輸線路效應表明,負載、節點到節點間隔和短截線長度對系統的信號保真度和抗干擾性都很重要。本文結尾列舉了較好的參考文獻。
實驗室數據例子
為了說明這些概念,可建立一個帶有兩個隔離 CAN 節點和 50 米線纜的實驗室裝置。我們預計單向線纜延遲為 250ns,隔離收發器環路延遲約為 150ns,即 ISO1050 標準的典型值。因此,節點 A 的采樣點應約為比特開始以后的 800ns,如圖 5 所示。
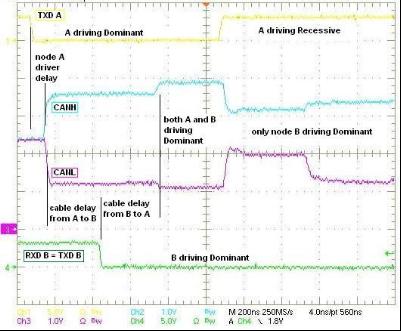
圖 5 50 米線纜的 1 Mbps CAN 信號速率(點擊圖片放大)
就 1Mbps 信號速率而言,在該比特結束以前,采樣點留有足夠的裕量,其表明使用快速收發器,40 米以上的線纜長度是可行的。
總結
廣大設計人員正在各種應用中使用 CAN 通信,他們需要了解計時限制和線纜長度權衡方法。信號鏈中每個組件都會影響總計時預算,同時必須考慮雙向延遲以確保可靠的通信。使用如 ISO1050 等快速收發器可保證 CAN 信號按時完成雙向傳輸,只有比 Pecos Bill 更快才能游過墨西哥灣。
參考文獻
如欲了解接口解決方案的更多詳情,敬請訪問:www.ti.com/interface-ca。
作者簡介
Clark Kinnaird 現任 TI 系統工程師,主要負責開發新型工業接口產品,以支持 RS-422、RS-485、CAN、ControlNet、Profibus 以及其他常見工業網絡的規范和應用。他畢業于美國佛羅里達大學 (University of Florida),獲核能工程理學士學位,后又獲得該校的電子工程碩士學位,后又畢業于南衛理公會大學 (SMU),獲電子工程博士學位。現在, Clark 還是南衛理公會大學達拉斯分校電子工程專業的一名客座副教授,主要教授電子電路、信號處理與控制理論等課程。