作 者:中南大學信息科學與工程學院 于 欣 王隨平 張佳潔
引言
深海作業機器人是一種在水深5000~6000米的海底沉積物上行走、采集錳結核的智能履帶車輛,兩條履帶由安裝在后輪上的兩臺液壓馬達分別驅動,用變量泵調節速度。我國采礦區位于太平洋中部,為典型的深海平原,其上覆蓋著很厚的淤泥及沉積物[1]。海底沉積物不同于陸地底質,剪切強度較低,具有攪動流體特性、塑性特性。如果深海作業機器人的行駛驅動力與沉積物特性不匹配,將出現履帶過度打滑現象。為保證深海作業機器人的安全行走,應使行走驅動力適合沉積物特性的變化。基于上述問題,深海履帶式作業機器人行走防滑控制技術的研究開發,將提升深海采礦系統安全作業水平。
國外機器人行走防滑技術的相關研究,daegun hong和paljoo yoon[2]提出了一種基于制動觀測器的防滑控制系統。制動觀測器負責評估車輪制動力,側滑力和摩擦系數的變化。國內相關研究,劉志新、張大衛、李幼德[3]建立了四輪驅動汽車加速過程的數學模型,以滑轉率為調節對象,提出一種基于模糊pid控制的驅動防滑控制asr算法。目前國內外對履帶車輛防滑控制相關技術尚處于起步階段,對復雜地形下的深海作業機器人,勢必要求人們對機器人與地面相互作用特性,行駛底質識別以及防滑控制做更深入的研究,也必將促進人們對這些問題的認識。
本文根據深海作業機器人行走的特點和海底環境的特點,建立了深海作業機器人的力學模型,并根據機器人驅動系統的結構和特點建立了液壓系統模型,設計了機器人防滑控制系統,并提出最佳滑轉率的辨識方法。基于matlab仿真平臺,對整個深海作業機器人防滑控制系統進行仿真。
深海作業機器人工作環境特性研究
(1)海泥土力學特性
深海作業機器人履帶與海泥的作用十分復雜,圖1為典型的海泥沉積物變形過程示意圖,s為海泥應變,p為海泥所受壓力。海泥受壓時的破壞可分為三個過程[4]:
直線變形階段(壓密階段):當履帶對海泥的壓載小于臨界荷載時,海泥被壓緊,地面能夠表現為彈性狀態。如圖1示,a點之前。
局部剪切階段(開始塑性變形):當履帶對海泥的壓載大于臨界荷載而小于海泥的極限承載力時,海泥出現塑性變形,隨著壓力的增大,塑性變形區逐漸擴大。如圖1示,a點與b點之間。
完全破壞階段(塑性變形區連成連續的滑動面):當壓力繼續增大,超過海泥的極限承載力,塑性變形區連成連續的滑動面,海泥被擠出來。如圖1示,超過“b”點后,應力增加一微小量,應變便顯著增加。這種顯著增加的應變,構成塑性流動。塑性流動以前的狀態,通常稱為塑性平衡狀態。從塑性平衡狀態轉變為塑性流動狀態,表示物質被破壞。
由以上分析可知,深海機器人應該工作在局部剪切階段才能較好的利用海泥提供的牽引力行走。
(2)履帶-海泥相互作用
當驅動履帶,在接觸面的地面上產生剪切作用。如圖2所示,為了預測車輛的牽引力和滑轉率,需要了解地面的剪切應力和剪切變形之間的關系。這個關系可由剪切試驗來確定。在剪切試驗中可用剪切板代替履帶刺的剪切作用。
經測定我國礦區內的海泥剪切特性存在明顯大于0的殘余剪切力。wong提出以下公式來表示改型土壤:
 (1)
(1)
式中,k-水平剪切變形模數,m;j-剪切位移,m。kr-殘余剪切應力與最大剪切應力比魊/鬽ax。
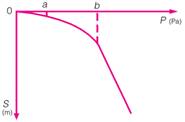
圖1 海泥變形過程示意圖
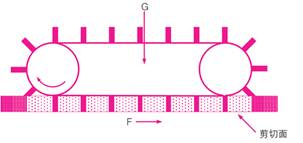
圖2 履帶的剪切作用
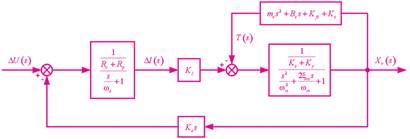
圖3 比例閥傳遞函數框圖
深海作業機器人模型
(1)深海作業機器人動力學模型
設機器車重心和幾何中心重合,接地段的土壤特性為各向同性,履帶接地段的負荷和土壤分布為均勻分布。
當機器車直線運行時,得單履帶車體模型:
![]() (2)
(2)
 (3)
(3)
式中,m-深海機器人單側模型質量,kg;j-履帶驅動輪相對于轉軸的轉動慣量,kg·m2;ω-履帶的轉動角速度,rad/s;fxl-履帶與海底地面間的附著力,n;fyl-履帶的壓實阻力,n;ftl-履帶的推土阻力,n;fw-深海機器人海水阻力,n;tml-左履帶馬達驅動力矩,n·m;r-驅動有效半徑,m。
(2)液壓傳動系統模型
在機器車行駛系統中采用變量泵-定量馬達的容積調速回路。其中,電控變量泵由電液比例方向閥控制液壓缸改變柱塞泵斜盤傾角的方式改變柱塞泵的排量,從而實現液壓系統的流量控制。電液比例方向閥數學模型,采用電-機械轉換元件直接驅動閥芯運動,從而將輸入電壓信號u轉變為閥芯的位移量xv。
比例電磁鐵控制線圈的端電壓增量方程:
δu(s)=lsδi(s)+(rc+rp)δi(s)+kesxv(s) (4)
銜鐵組件的動態力平衡方程:
kiδi(s)=mts2xv(s)+btsxv(s)+(ks+ky)xv(s)+t(s) (5)
閥芯動態力平衡方程:
t(s)=[mvs2+bvs+(kv+kfv)]xv(s) (6)
式中,l-線圈電感,h;rc,rp-線圈和放大器內阻,ω;ke-線圈感應反電動勢系數,v;ki-比例電磁鐵電流力增益,n/a;mt-銜鐵組件質量,kg;bt-阻尼系數,n·s/m;ks-銜鐵組件的彈簧剛度,n/m;mv-閥芯質量,kg;bv-閥芯的粘性阻尼系數,n·s/m;kv-閥芯對中彈簧剛度,n/m;kfv-作用于閥芯上的穩態液動力剛度系數,n/m;δi-線圈電流,a;ky-比例電磁鐵的位移力增益和調零彈簧的剛度之和,n/m;t-銜鐵外負載,n。
比例方向閥的模型框圖如圖3所示。
深海作業機器人防滑滑模變結構控制方法
(1)滑模切換函數
履帶的縱向滑轉率最好控制在略小于理想滑轉率λt的一個小區域內,以便充分發揮履帶的牽引能力,同時又能保證車輛具有一定的側向性能。在實現防滑的滑模變結構控制時,若以履帶縱向滑轉率λ作為控制目標,設控制目標理想滑轉率為λt,那么滑模變結構控制履帶過度滑轉實質上就是調節履帶實際縱向滑轉率與目標縱向滑轉率λt之間的差值,并使之趨近于零。
控制的目標是尋找驅動力矩tm的控制規律,使得滑轉率跟蹤誤差e趨向于零,設λt為海底行走最佳滑轉率,則就是最佳滑轉率對時間的導數。
假設最佳滑轉率已知,控制的目的為控制驅動力矩的輸入,使跟蹤誤差λ(t)-λt(t)趨近于零,所有狀態變量有界。
滑模控制器應用切換函數來改變tm的控制規律,定義切換函數為:
![]() (7)
(7)
式中c1為待定系數,c1>0,e為驅動輪滑轉率的誤差變量,e=λ-λt
(2)基于μ-λ曲線形狀的λt估計
通過分析可以提出λt的搜尋方法:
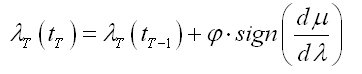 (8)
(8)
式中,φ是一符號為正的步進常數,當時,λt的值增加φ,同理,當時的λt的值減少φ。這樣累計之后就能夠得到系統的最佳滑轉率。
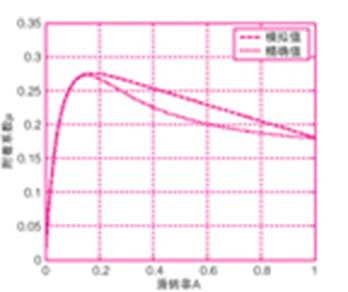
圖4 不同行駛底質附著系數-滑轉率關系圖
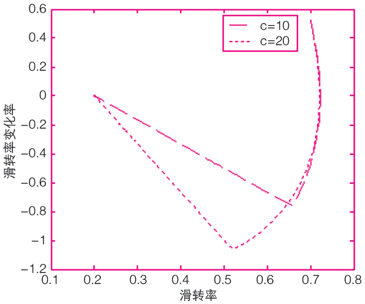
圖5 滑轉狀態相軌跡圖
仿真結果
(1)滑轉率辨識仿真
圖4中顯示的是深海底附著系數-滑轉率關系的擬合方法仿真結果。點虛線為根據附著系數定義由縱向牽引力得到的附著系數精確值c=2500;k=0.3;kr=0.45;a=3.25;g=50000;。劃線虛線為根據burckhardt公式得到的擬合值,c1=0.3016;c2= 23.129;c3=0.121可以看出在附著系數的上升段擬合值和精確值幾乎完全重合,該段對于最佳滑轉率的識別是最有意義的一段,所以文中所用的擬合方法有很高的準確性。
(2)滑轉率跟蹤仿真
圖5為滑轉率跟蹤控制的相軌跡圖,如圖中所示,在控制過程中,其相軌跡迅速趨于切換線,并在到達切換線之后將沿切換線快速滑向設定的理想值(λt,0),從而達到控制的要求。
結論
本文以深海作業機器人為研究對象,以車輛地面力學為基礎,分析了深海作業機器人在深海底行走的特點,并在此基礎上建立了作業機器人的動力學模型。分析了履帶防滑控制的原理,確立了以滑轉率控制為核心的控制方案。基于曲線形狀的最佳滑轉率辨識方法,根據附著系數對滑轉率的導數正負來辨識滑轉率的情況,從而推導出由可測參數馬達轉矩和履帶角加速度來間接得到導數的正負值從而辨識出最佳滑轉率值。以matlab為平臺,對液壓驅動系統進行了建模和仿真,驗證所建模型的合理性。
作者簡介
于欣(1986-) 女 碩士在讀,研究領域:人工智能,計算機控制,深海機器人等。
參考文獻
[1] 丁六懷,高宇清,簡曲,等.中國大洋多金屬結核集礦技術研究綜述[j].礦業研究與開發,2003,23(4):5~8.
[2] daegun hong, paljoo yoon. wheel slip control systems utilizing the estimated tire force. minneapolis, minnesota, usa: the 2006 american control conference, 2006.
[3] 劉志新,張大衛,李幼德,等.基于滑轉率的四輪驅動汽車防滑模糊控制仿真[j].農業機械學報,2005,36(12):21~24.
[4] 張克健.車輛地面力學[m].北京:國防工業出版社,2002.
