
摘 要: 針對足球機器人的特點,提出一種基于SC6121芯片的紅外線通信系統設計方案,它比以往基于芯片M50462的紅外線通信系統有更多的優點。
關鍵詞: 足球機器人 紅外線 裝置
1995年9月,韓國科學技術研究院(KAIST) 金鐘煥教授提出了舉辦世界機器人足球比賽的建議,同年11月在KAIST建立了為召開微機器人世界杯足球比賽所需的國際組織委員會。1995年11月9~12日在KAIST首次舉辦微機器人世界杯足球比賽,至今已經舉辦四次比賽。足球機器人主要由CPU板、傳感器、驅動部分、通信系統、視覺系統、主機系統等部分組成。本文作者曾經發表過文章研究足球機器人紅外線通信問題,當時是以M50462作編碼芯片來研究的。它的缺點有兩個,其一是可靠性不夠高;其二是M50462能夠選擇的用戶編碼只有2位,組成網絡通信最多只有4個用戶編碼。而SC6121可靠性高,且有8位用戶編碼可以選擇,組成通信網絡系統可以有256個用戶編碼。因此,在足球機器人紅外線通信系統中選擇SC6121作為編碼芯片更合適。本文將討論如何用編碼芯片SC6121實現足球機器人的網絡通信。
1 系統構成
時分多址(TDMA)技術是網絡通信經常采用的一種技術。在通信速率要求不高的通信系統里,有時將信息的接收和發射設計在同一個信道上,該技術被稱之為時分雙工(TDD)技術,它是TDMA的一個變形。我們設計的基于SC6121芯片的足球機器人紅外線通信系統采用的就是TDD技術。在該系統中把與計算機RS232C相連接的通信裝置看作通信系統的基站,它負責對通信系統的控制。把足球機器人上的通信裝置看作用戶,這樣就構成了如圖1所示的足球機器人通信系統。每個足球機器人通信裝置占用SC6121芯片二個用戶編碼,其中一個作為該通信裝置接收時隙的識別碼,另一個作為發送時隙的識別碼。基站通過控制芯片SC6121的用戶編碼來給各個機器人分配接收時隙和發送時隙。SC6121有256個用戶編碼,采用TDD技術可以構成128個通信裝置。若將其中一個用于作基站,則系統通信裝置數目的最大值是127,這足以滿足足球機器人通信要求。

2 編碼電路
發射部分采用SC6121紅外線遙控系統的專用芯片,它由振蕩電路、定時發生器及控制電路、鍵盤輸入掃描電路、鍵盤輸入/輸出掃描電路、碼產生電路和輸出控制電路等組成。振蕩器產生一個固定頻率(我們選用455kHz)的信號,該信號經過定時發生器(12分頻)選通后,產生時鐘脈沖和載頻信號(固定頻率為455kHz時,是38kHz),其中時鐘脈沖送往碼產生電路;載頻信號則送往輸出控制電路,碼產生電路輸出的指令碼被調制在此載頻信號上,此信號再經緩沖放大器放大后從集成電路內輸出。輸出信號去激勵晶體管(8550),從而控制流向紅外線發光二極管(PH303)的電流。當紅外線發光二極管(PH303)有正向電流流動時,就向外發射紅外線,進而達到發射編碼的目的。SC6121的輸出波形參見圖2。

從圖2可以看出,SC6121所發射的一幀碼含有一個引導碼,16位的用戶編碼和8位的鍵數據碼。鍵數據碼的反碼也同時被傳送。引導碼由一個9ms的載波波形和4.5 ms的關斷時間構成,它作為隨后發射碼的引導。這樣,當接收系統是微處理器構成的時候,能更有效地處理碼的接收、檢測及各項控制之間的時序關系。SC6121芯片編碼采用脈沖位置調制方式(PPM),利用脈沖之間的時間間隔來區分“0”和“1”。在8位編碼被傳送的同時,它們的反碼也被傳送,這樣就大大減少了系統誤碼率。M50462沒有傳送反碼,因此,從這一點來看,SC6121比M50462具有更高的可靠性。
SC6121發送電路原理參見圖3。從圖3可以看到,基于SC6121芯片的紅外線通信網絡可以有256個用戶編碼,而M50462最多只能有4個用戶編碼。由此可見,SC6121更適合網絡通信。

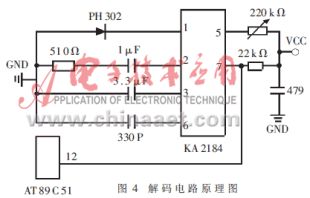
3 解碼電路
接收部分由PH302紅外線接收管及前置放大電路KA2184組成,放大后的信號直接送往AT89C51單片機,由單片機進行軟件解碼。接收電路原理參見圖4。
4 解碼軟件
根據圖2中的②可以得到“0”代碼脈沖間距為1.125ms,“1”代碼脈沖間距為2.25ms。這樣通過AT89C51單片機的定時器可以很方便地得到解碼。
SC6121編碼集成電路鍵數據碼參見表1。

我們用AT89C51單片機的定時器1定時,用AT89C51的12腳作外部中斷,通過軟件解碼得到鍵數據碼后,再查表1,這樣就可以分析出信息含義,從而實現軟件解碼。中斷程序流程圖參見圖5。

有了編碼和軟件解碼后就可以實現通信了。基站通過編碼將信息傳送給足球機器人的通信裝置,足球機器人通信裝置通過軟件解碼得到信息內容。反過來也一樣,足球機器人通信裝置通過編碼將信息發送出去,基站通過軟件解碼得到信息。足球機器人通信裝置、基站以及信息的傳輸方向均通過SC6121芯片的用戶編碼來區分。
參考文獻
1 王義玉.紅外探測器.北京:兵器工業出版社,1998
2 馮克成.紅外光學系統.北京:兵器工業出版社,1994