
引言
ARM ADS全稱為ARM Developer suite(ARM開發套件)。ADS的CodeWarrior集成開發環境(IDE)是基于Metrowerks CodeWarrior IDE4.2版本的,經過適當的裁剪以支持ADS工具鏈,為管理和開發項目提供了簡單多樣化的圖形用戶界面,用戶可以使用ADS的CodeWarrior IDE為ARM和Thumb處理器開發用C、C++或ARM匯編語言的程序代碼,縮短了用戶開發項目代碼的周期。ADS中包括3個調試器:AXD(ARM ExtendedDebugger)、ARMSD(ARM Symbo l i c Debugger)、ADW/ADU(Appl icat ion Debugger Windows/Unix)。在軟件開發的最初階段,可以使用調試器進行仿真來測試所開發的軟件是否達到了預期的效果。
在數據采集的實際開發應用中,串口通信是不可缺少的部分,它是目前嵌入式系統與PC機間的一種非常重要且普遍使用的通信方式。計算機利用串口對單片機等外部設備的控制減少了在訪問外部設備時需要進行復雜的匯編語言編程等帶來的麻煩,同時也有利于大規模的開發和設計。在Linux系統中,系統把串口等其它外設當作文件進行操作,在端口的讀寫上非常方便,大大提高了系統編程效率。本文通過把Linux系統移植到S3C2410后,利用S3C2410自帶的串口對目標實現控制,詳細地介紹了串行通信的硬件電路和軟件的實現方法。
S3C2410硬件平臺簡介
S3C2410是韓國三星公司生產的新一代高性能微處理器,它是基于ARM920T內核的16/32位RISC處理器。主要應用于嵌入式系統中。
S3C2410擁有強大的數據處理能力。又有著低成本。低功耗等優點。在各種手持及移動設備上的應用越來越廣泛,基于其平臺的程序功能也越來越復雜。于是,在其平臺上架構多線程的操作系統已成為越來越多系統設計者的訴求,本文介紹多線程在S3C2410上的具體實現過程。
硬件結構
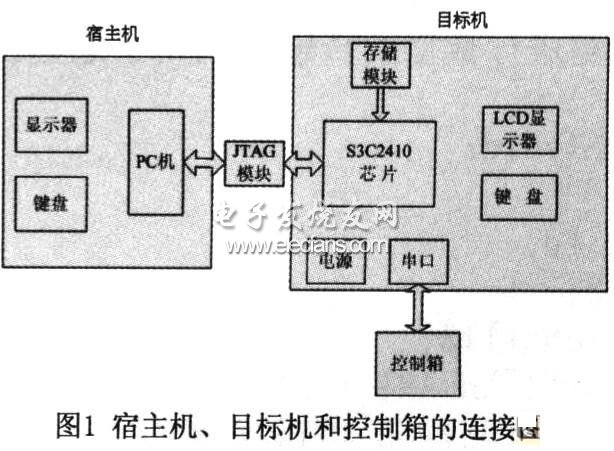
目前串口大部分是在Windows或是在Dos下運用,本文是在Linux系統下利用串口來實現通信的。S3C2410芯片是三星公司生產的 16/32bit的RISC處理器,獨立的16kB指令和16 kB數據的緩存(cache),用于虛擬內存管理的MMU單元,LCD控制器(STN&TFT),非線性(NAND)FLASH的引導單元,系統管理器(包括片選邏輯控制和SDRAM控制器),3個通道的異步串口(UART),每個控制器支持的最高波特率可以達到230400 Boud/s,這些特點為實現在Linux系統下計算機與開發板之間順利進行串口通信提供了可靠的保證。WNSC400是北京維納光科公司生產的電動位移平臺控制箱,它擁有RS232的串口能使S3C2410通過串口對其進行數據通信,從而能夠實現S3C2410對電動位移平臺的控制。但是控制箱是在 Windows環境下實現的,所以要想把它應用到嵌入式系統中是存在難度的。S3C2410的串口要實現與控制箱的數據傳輸,那么就要使控制箱及其控制的電動平移臺實現與其它模塊組成嵌入式系統,比如與一臺攝像頭聯系起來,當攝像頭對物體進行圖像采集后,對采集數據進行處理,進而計算出目標具體要改變的位移等參量,然后控制箱在通過$3C24lO的存儲器中讀取這些數據,并發出命令使電動位移平臺按需要的改變量進行移動,這樣就是實現了一個簡單的嵌入式系統。計算機(宿主機)、目標機(S3C2410)還有控制箱之間連接的硬件原理如圖1所示。在宿主機上將在ADS環境下編好的程序通過JTAG下載到 S3C2410后,S3C2410就可以通過串口與控制箱進行通信。
UART軟件
通用異步收發器(UART)是一種串行接口,許多微處理器和微控制器中都包含這種外設接口。異步串行接口提供了一種簡單的途徑,使兩個器件無需共享同一個時鐘信號就能進行通信。如果再加入一個合適的電平轉換器,串口還能用在RS-232和RS-485網絡中通信,或者與計算機的COM端口連接。串口只需兩根信號線(Rx和Tx)即可實現,而且只要兩端器件都采用同樣的位格式和波特率,那么它們無需其它任何對方的信息就可以成功傳輸數據。軟件UART的意義
如今,可提供功能完善的硬件串口的微控制器比比皆是,那么我們為什么還要費力地用微控制器的端口管腳來實現軟件UART呢?主要有以下幾個原因:
首先,盡管確實有許多微控制器都包含了硬件UART,但仍有許多沒有包含這種接口。在系統設計中,選擇微控制器時,可能很難找到一款各方面都很理想的產品。例如,電壓范圍合適的微控制器可能內部存儲器不夠大,而存儲器大小足夠的可能又沒有足夠的端口管腳,無法滿足設計需求。因此,通過軟件方式實現某些系統需要的外設接口,從而彌補一款微控制器性能上的缺陷,就能增加可供設計選擇的微控制器的數量和種類,從而增大設計的靈活性。
第二,即便一款微控制器包含了一個功能完善的硬件UART,由于某種原因,這對即將進行的設計來說可能仍然不夠。例如,可能是微控制器需要與之通信的外設所用的協議與串口協議稍有不同,也可能是硬件UART所提供的位數、奇偶校驗功能或輸入和輸出緩存無法完全滿足應用的要求。這時,通過構建一個軟件UART接口,我們在定義UART的功能和串口協議的細節上就更靈活。
第三,一款微控制器的硬件UART也許能夠很好地滿足應用的需求,但只是數量不夠。例如,微控制器包含兩個UART,而設計中的應用卻需要三個。此時,我們不必僅僅為了增加串口的數量就另外增加一塊新的芯片,而只需增加一個與該微控制器上現有的UART具備同樣功能和特性的軟件UART。
UART軟件部分的實現
絕大多數的Linux軟件開發都是以native方式進行的,即本機(HOST)開發、調試、本機運行的方式,但是由于在目標機上沒有足夠的資源來滿足嵌入式系統的開發,所以這種方式不適合于嵌入式系統的軟件開發。通常嵌入式系統軟件開發采用交叉編譯調試的方法。交叉編譯的主要特征是某機器中執行的程序代碼不是由本機編譯生成,而是由另外一臺機器編譯生成。
串口通信的基本任務有:實現數據格式化、進行串/并轉換、控制數據傳輸速率、進行錯誤檢測和進行TTl與EIA電平轉換。串口通信分為同步通信和異步通信兩種類型,本文將用到異步串行I/0。
由于Linux系統將所有的設備都看成文件,所以訪問串口時,認為串口是一個文件,我們可以使用文件系統控制函數實現基本的串口操作,比如open()函數用來打開串口,read()和write()函數用來讀寫串口,在傳輸數據完成后可以用close()函數關閉串口。
構造了一個嵌入式版本的Linux文件系統,它使得內核在系統盡量精簡的情況下能夠運行起來,并滿足產品和系統各方面的要求。其中,為文件系統配置用戶和屬組以達到一定的安全性更是系統的一大特色。另外,在這個嵌入式文件系統中,引入了VFS的支持,雖然犧牲了一些空間,但是大大方便了今后各種物理文件系統的動態加載。Linux的文件系統事實上非常的龐大,構造一個嵌入式的Linux文件系統是一個很復雜的過程
串口的基本設置
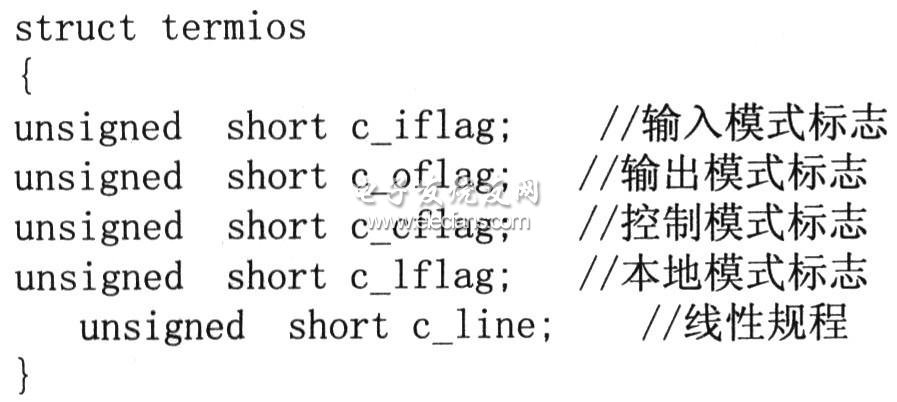
串口最基本的設置有波特率設置、檢驗位和停止位的設置。串口的設置主要是設置struct termios結構體的各成員值:
 串口的讀寫
串口的讀寫
發送數據
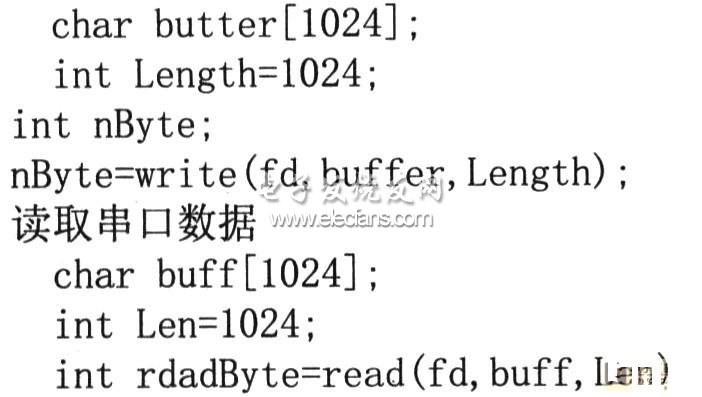
除了上面用read來讀取串口的方法外,也可以使用操作文件的函數來實現異步讀取,如fcnt1,或者selectt等。
應用程序
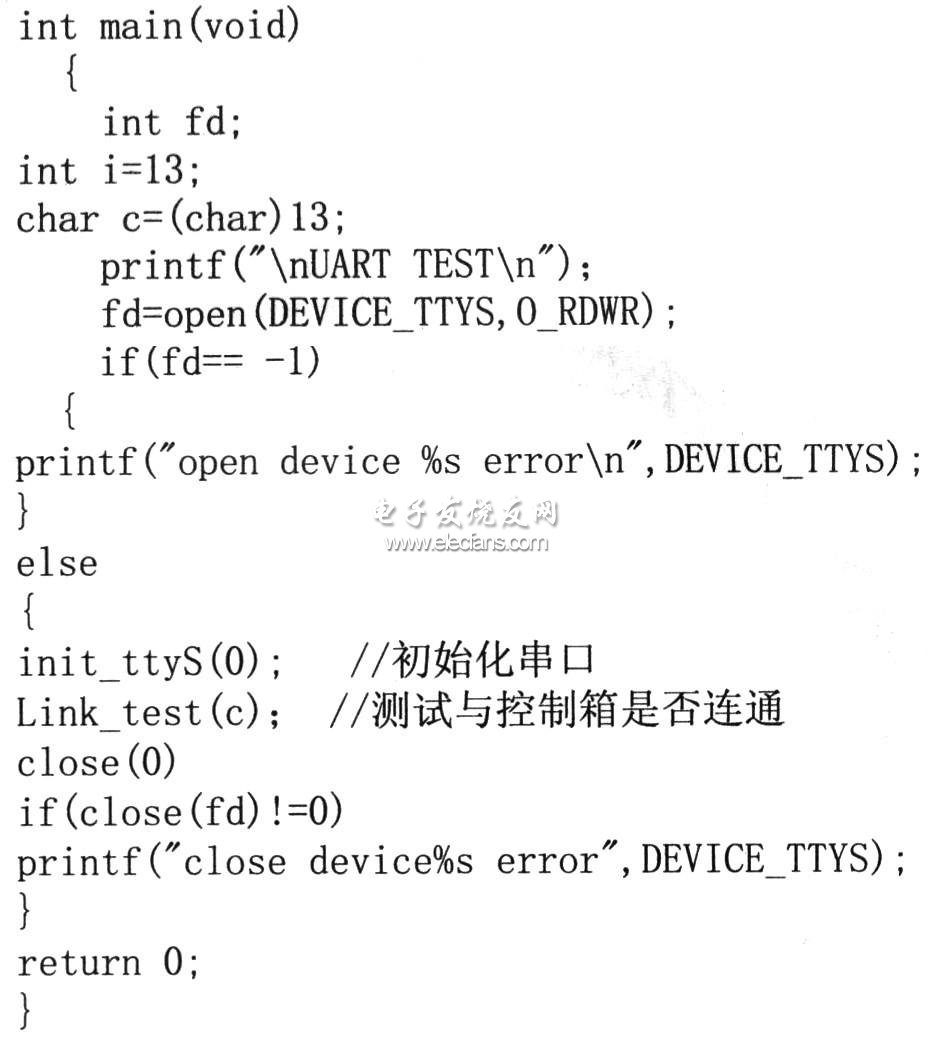
ADS開發平臺的優點是它已經把串口的相關設置函數都已經包含在相關的頭文件中,這樣當開發人員想利用串口進行再次研發時就可以直接利用這些函數,或者在原函數上進行修改。本文中要通過S3C2410的串口對WNSC400控制箱進行數據的傳輸就利用了這些優點,部分程序如下:
結語
在ADS環境下進行的開發減少了直接在Linux系統下進行串口開發所遇到的麻煩,而且由于AARM具有多功能模塊擴展功能,可以使多種功能集中起來,為WNSC400控制箱及其電動平移臺廣泛應用于嵌入式系統中創造了條件。