
1 引言
在造紙、印染、紡織等高精度、高轉速傳動系統中,隨著工業自動化程度的提高和生產規模的擴大,采用單電機驅動往往難以滿足生產的要求。而多電機" title="多電機">多電機同步控制" title="同步控制">同步控制歷來是最核心的問題,對多電機同步協調控制,國內、外同行也有不少研究。在實際應用中,多電機的同步性能會因各傳動軸的驅動特性不匹配、負載的擾動等因素的影響而惡化,因此同步控制方法的好壞直接影響著系統的可靠性。
本文通過對的多電機同步傳動系統主要控制策略分析,得出改進的耦合控制是當前比較好的控制思想,實際應用中采用易于實現的PID作為同步補償控制器算法。但傳統PID控制器結構簡單、魯棒性較差且抗擾動能力也不太理想。因此在控制策略上,采用神經網絡控制和PID控制算法相結合的方法。仿真結果表明,將該方法用于多電機同步控制中,不僅具有良好的動態性能,而且整個系統同步精度也有所提高。
2 多電機同步控制的原理
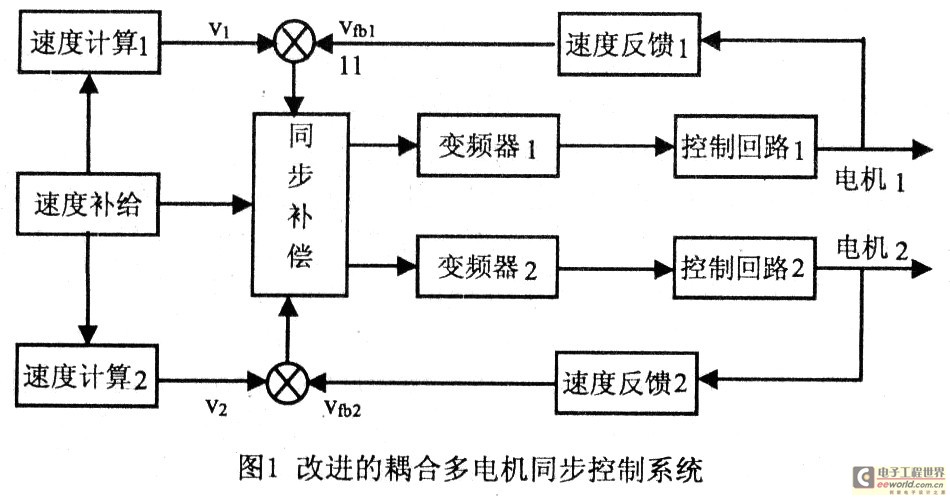
對于多電機同步控制系統" title="控制系統">控制系統來說,實現的是電動機轉速的跟隨,受到擾動的電動機轉速是變化的,其它的電動機跟隨這臺電動機的轉速變化。在系統受到擾動后的初始狀態,電動機之間的轉速趨于同步越快越好,即應盡快消除轉速偏差;當電動機之間的轉速趨于同步時,要盡量減小轉速發生超調。一般情況是要求系統中的第i臺電動機轉速vi和第i+l臺電動機轉速vi+1,之間保持一定的比例關系,即vi=a·vi+1以滿足系統的實際工藝要求。這里a為轉速同步系數。在實際運行過程中若要滿足系統的同步要求,周期采樣獲取某一環節的前臺電動機轉速vi和后臺電動機轉速vi+1后,vi和vi+1按下式定義轉速同步偏差時,表明在同步系數a下,vi和vi+1同步,當e≠0時,表明在同步系統aF,vi和vi+l不同步.在本文中采用改進的耦合同步控制系統(如圖1),各電機采用同一電壓給定的基礎上,電機l轉速誤差△v1=v1—vfb1,電機2的轉速誤差△v2=v2一vfb2,計算某一電機實際速度和給定速度的偏差e,以及當前的偏差變化量△e,同步控制器補償同樣采用PID控制。其差值經過PID補償器" title="補償器">補償器加到隨動電機輸入端。
3 基于神經網絡PID控制器的建立
BP神經網絡是應用最廣泛的一種人工神經網絡,在各門學科領域中都具有很重要的實用價值,根據本系統的控制系統的特點,為了快速消除同步誤差,本文采用BP神經網絡與PID相結合的作為同步補償方法。
3.1 BP神經網絡PID控制系統的結構
基于BP網絡的PID控制系統結構如圖2所示,控制器由兩部分組成:
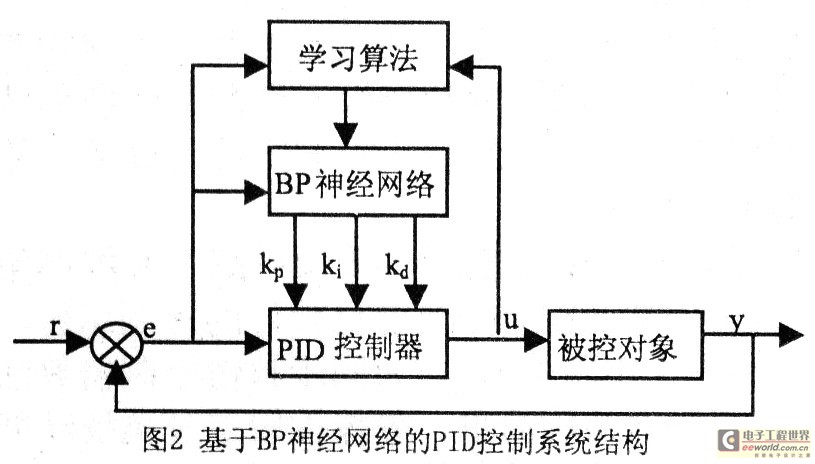
(1)常規PID控制器,直接對被控對象進行閉環控制,并且其控制參數Kp、Ki、Kd為在線調整方式;
(2)BP神經網絡,根據系統的運行狀態,調節PID控制器的參數,以期達到某種性能指標的最優化,使輸出層神經元的輸出對應于PID控制器的3個可調參數KD、Ki、Kd。通過BP神經網絡的自學習、加權系數的調整,使BP神經網絡輸出對應于某種最優控制規律下的PID控制器參數。以電機作為控制對像,一般采用增量式PID控制算法進行控制。它的控制算式為:

式中KP、KI、KD分別為比例、積分、微分系數.
3.2 神經網絡PID的算法實現
1)訓練階段的工作
第l步:設計輸入輸出神經元。本BP網絡的輸入層設置3個神經元,分別為輸入速度vi、速度偏差e和偏差變化量△e,輸出層有3個神經元,為PID控制器的3個可調節參數Kp、Ki、Kd
第2步:設計隱含層神經元個數。本文初步確定隱含層節點數為5個.學習一定次數后,不成功再增加隱含層節點數,一直達到比較合理的神經元數為止;
第3步:設計網絡初始值。本文中設定的學習次數N=5000次,誤差限定值E=0.02;
第4步:應用Simulink對BP網絡進行訓練和仿真。
2)測試階段" title="測試階段">測試階段的工作
在測試階段,主要是對訓練過的網絡輸入測試樣木,測試網絡的學習效果,即判斷網絡的運算值與樣本的期望值之差是否在允許的范圍之內。在此不再贅述具體判定過程。
4 仿真與分析
本文以2臺電機同步為模型進行仿真。在電機的參數設定時,對2臺電機的參數取相同值。電機參數為:定子每相繞組電阻R=5.9Ω,定子d相繞組電感Ld=0.573,轉子電阻R=5.6Ω轉子電感L=O.58給定轉速n=500rad/sec,極對數為3。在t=0.05 s時,突加階躍擾動,利用Matlab對傳統PID和神經網絡PID分別進行仿真,得到實驗曲線如圖所示.
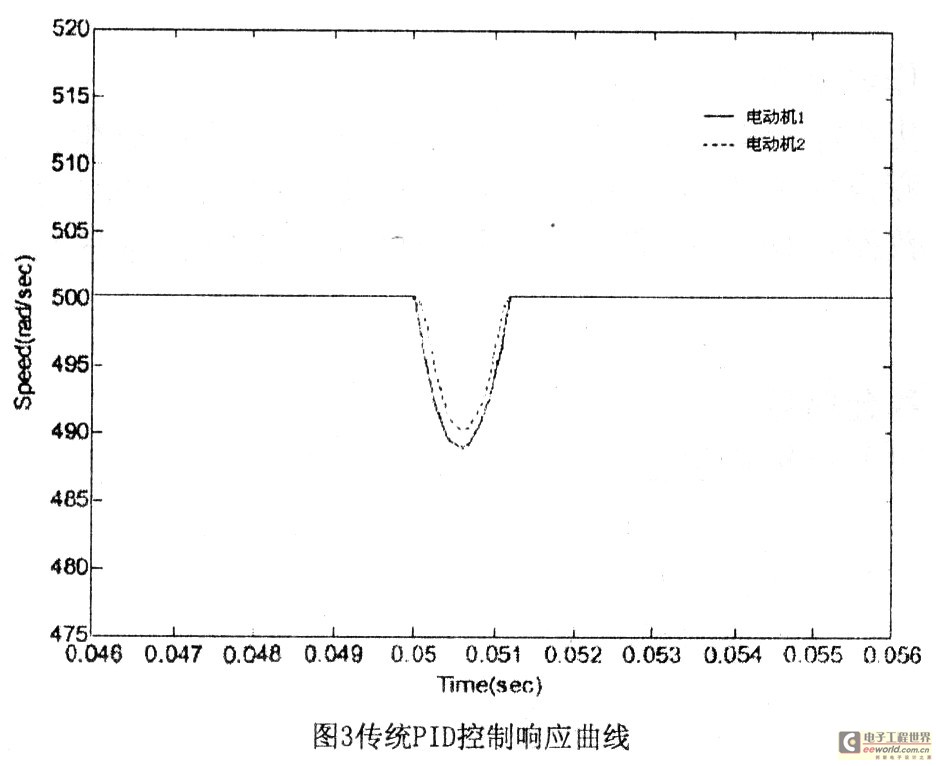
圖4神經網絡PID控制響應曲線
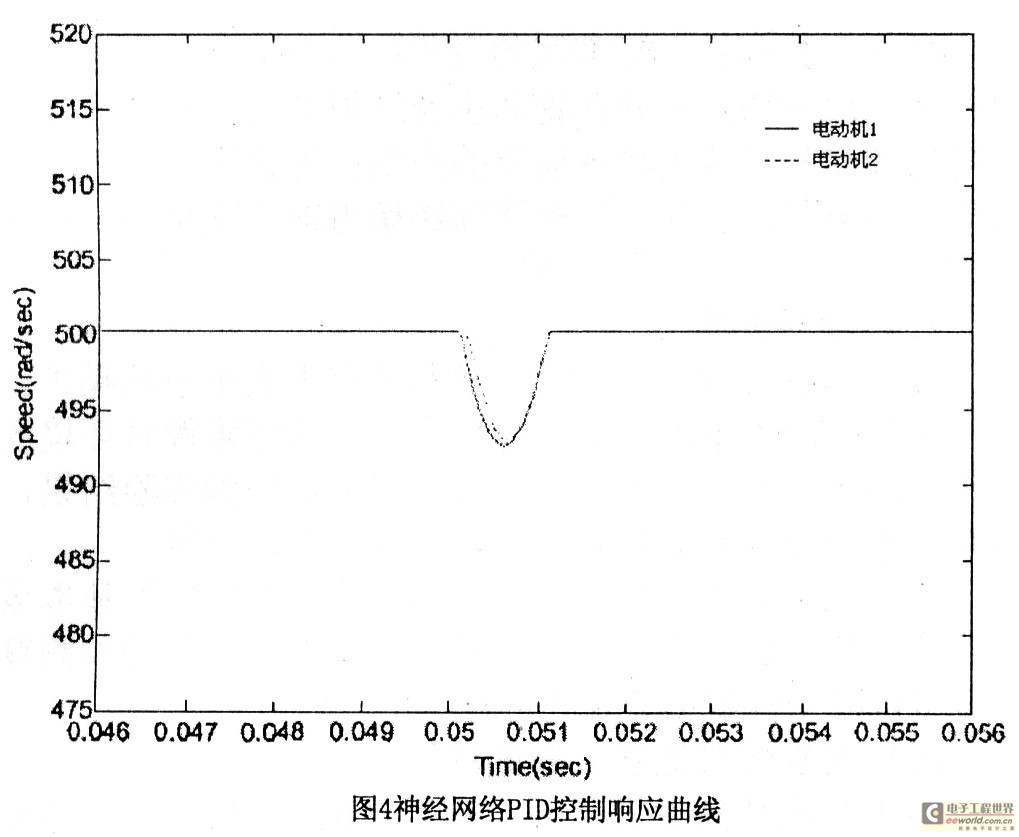
比較兩種仿真結果,經計算采用常規PID補償器時,突加負載擾動后,同步誤差△Verror=0.26%采用神經網絡PID補償器時,突加負載擾動后,同步誤差△Verror.=O.08%,由些可以看到采用神經網絡PID補償器方法的時候,系統的同步性能、抗干擾性能優于只采用常規PID補償器時的性能,其具有更好的控制特性。
5 結束語
本文針對于多電機同步控制中出現的多變量、強耦合、具有大慣性環節、難以建立準確數學模型的被控對象,在傳統PID的基礎上引入神經網絡的的概念,將神經網絡PID用于速度同步補償中,仿真結果表明,該方法使系統的抗干擾能力增強,同步精度有所提高,控制效果良好。