
目前電梯的生產情況和使用數量成為一個國家現代化程度的標志之一。電梯是機電一體的高層建筑的復雜運輸設備。它涉及機械工程、電子技術、電力電子技術、電機與拖動理論、自動控制理論等多個科學領域。電梯呼梯控制器是電梯的一個重要組成部分, 位于每一層樓電梯門的左邊或者右邊,是每一層樓的呼叫裝置,用于給出每一樓層的呼叫請求信息,并顯示電梯當前運行情況。乘客可以通過顯示器、按鍵等了解到電梯運行的大量信息。本文采用CAN總線技術設計呼梯控制器,各控制器之間只需一對雙絞線以一定的網絡拓撲結構連接即可,安裝極為方便,且可靠性高。對于不同樓層數的控制系統只需在CAN總線中加入相應數目的呼梯控制器即可,主控制器硬件軟件不需做任何改動,使得電梯控制系統安裝更加靈活和方便。
2 電梯呼梯控制器簡介
電梯呼梯控制器是電梯系統的呼叫部分,按照功能來說,呼梯控制器包括三大部分:電梯顯示單元、呼叫接收單元和通信單元。
(1)顯示單元:
呼梯顯示單元是乘客與電梯之間人機交流的部分,它的作用是電梯門區等待電梯的乘客能夠及時的了解電梯當前所在運行樓層,電梯當前運行方向以及當前本樓層的呼叫情況。本系統采用兩個8段發光LED作為樓層顯示器,采用兩個帶有上下箭頭LED作為電梯上下運行的方向顯示器,呼梯控制器通過與主控進行通信,獲取當前電梯情況并顯示出來。
(2)呼叫接收單元:
當乘客需要乘坐電梯時,乘客需要通過每層樓中的呼梯面板上的兩個呼叫按鈕進行呼叫,給電梯控制系統發出上呼(需要到達當前樓層以上的地方的呼叫)和下呼(需要到達當前樓層以下的地方的呼叫)請求。呼梯控制器接收到呼叫請求后,經過處理,通過通信單元發送給主控制器。
(3)通信單元:
在傳統的電梯控制系統中,呼梯和主控之間通信是采用點對點的通信方式,即I/O直接控制方式,主控器通過16根樓層顯示線、2根方向顯示線、2個呼叫登記等多根信號線直接與每一層樓的呼梯板進行直接連接,當電梯樓層增加時,使得系統連線異常復雜。因此,本系統采用CAN總線完成呼梯與主控之間的通訊,大大簡化了系統結構。
3 系統硬件設計
電梯呼梯控制器采用PIC18F258單片機作為核心,該單片機自帶CAN收發接口。外圍電路由CAN驅動模塊、輸入模塊、顯示模塊及撥碼開關、上按鍵、下按鍵和調試接口等組成。電梯呼梯控制器作為CAN總線網絡的一個節點,CAN驅動模塊是呼梯控制器和物理總線間的接口,提供對CAN總線的差動發送和接收功能;輸入模塊接收主控發出的上呼,下呼以及到站開門信號等, 這些信息按照通信協議的要求,經過處理后裝入郵箱再發送到CAN總線上;顯示單元包括按鍵燈顯示、點陣顯示和檢修燈顯示3個部分,其中點陣顯示還能實現樓層數和方向箭頭的滾動效果。
3.1 CAN驅動模塊
CAN (Control Area Network,控制局域網絡)最早是由德國BOSCH公司推出,用于汽車內部測量與執行部件之間的數據通信。其總線規范現已被ISO國際標準組織制定為國際標準,廣泛應用在離散控制系統。CAN協議也是建立在國際標準組織的開放系統互連模型基礎上的,但其模型結構只有3層,即只取OSI底層的物理層、數據鏈路層和最上層的應用層。其信號傳輸介質為雙絞線。通信速率可達1Mbps/40m,直接傳輸距離最遠可達l0km/kbps。可掛接設備最多為110 個。CAN屬于一種有效支持分布式控制和實時控制的串行通信網絡,采用了許多新技術及獨特的設計。與一般的通信總線相比,CAN總線的數據通信具有突出的可靠性、實時性和靈活性。
CAN收發器選用PHILIPS公司的PCA82C250,它是一種應用廣泛的CAN控制器與物理總線間的接口芯片,能夠對總線的信息進行差動發送和接收。為提高系統的抗干擾能力,在PCA 82C250和PIC18F258之間增加了高速光隔6N137。為了保證CAN總線的穩定性,CAN驅動模塊的電源采用DC2405單獨供電。
3.2 顯示單元
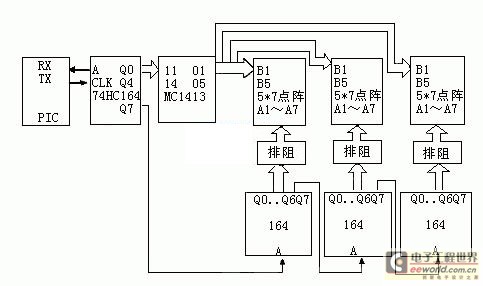
呼梯控制器顯示單元包括按鍵燈、樓層、方向箭頭和檢修燈的顯示。傳統的電梯都是用七段碼來顯示方向箭頭和樓層數,本系統采用5×7的LED點陣顯示屏來顯示,并且可以讓箭頭和樓層數在電梯運行的時候進行滾動顯示。PIC通過TX口發送4個8位串行信號,發送順序依次為箭頭方向,十位樓層,個位樓層和行選中。將上一個串行轉并行器件74HC164的并行輸出端Q7與下一個74HC164的串行輸入端A相連,構成4個74HC164的級連,最先發送的箭頭方向信號就被傳送到最后一個74HC164上,后3個74HC164的輸出端Q0~Q6分別連接3個點陣的列地址A1~A7,第一個74HC164的 Q0~Q4通過單向驅動器件MC1413連接3個點陣的行地址B1~B5。點陣采用掃描的方式,軟件中每隔1ms輸出一行,因此5行只需要5ms的時間, 人眼不會感到閃爍;列信號每隔50ms移一位,因此可以產生箭頭和樓層數的滾動效果。當電梯出現故障時,單片機通過I/O口輸出高電平來點亮檢修燈。點陣顯示原理圖如圖1所示。
3.3 呼叫單元
呼梯控制器中還包括撥碼開關、上按鍵、下按鍵和調試接口。撥碼開關用來設置該呼梯控制器所在樓層的樓層號,當電梯上行或下行時,主控制器將當前電梯所在的樓層號與乘客預期到達的樓層號相比,如果相同則電梯停止運行,如果不同則繼續上行或下行,同時箭頭向上或向下滾動。上、下按鍵是乘客發出呼叫的部分,呼梯接收到呼叫請求后,經過處理,通過通信部分發送給主控制器。調試接口是用來下載程序或仿真調試。仿真器選用貝能公司的ICD2。
4 系統軟件設計
4.1 CAN通信軟件設計
本系統中CAN模塊工作于配置模式和正常工作模式。首先在配置模式下將控制和狀態寄存器,波特率控制寄存器,I/0控制寄存器,中斷標志和控制寄存器,接收掩碼寄存器和接收濾波寄存器按照系統要求設定好,以保證CAN總線暢通。此寄存器只能在配置模式下進行設定,設定完畢后進入正常工作模式。上位機和下位機都將各自的CAN接收中斷打開,等待CAN總線傳送來的數據。
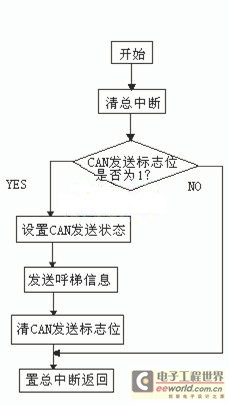
當發送呼梯信息時,CAN的16位設置CAN發送的格式、數據楨和位數據;17位存放樓層號作為ID號;18位設為0;19和20位存放上行信息,有上行信息就發送2個字節FFFFH,如果沒有就發送0000H;21和22 位存放下行信息。CAN模塊發送數據流程圖如圖2所示。
4.2 主程序設計
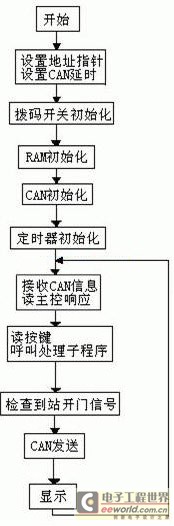
軟件要實現撥碼開關的初始化設置、 CAN的初始化設置、讀主控響應并接收從CAN總線傳來的信息、處理按鍵呼叫子程序、CAN發送以及點陣顯示。程序主流程圖如圖3所示。
5 結束語
本文以PIC18F258為核心,設計了具有CAN通訊接口的電梯呼梯控制器,經過近1年的現場使用,表明該控制器具有良好的功能特性和極高的可靠性,現場抗干擾能力強,而且性能價格比較高。系統結構簡單,安裝方便,是未來電梯控制系統發展的趨勢,目前已經成功地投入批量生產。