
模糊邏輯基于人類模糊思維這一抽象機理,它強調的重點是應用的簡單和方便。自20世紀60年代,模糊數學的建立為模糊推理系統尤其是模糊控制系統的應用奠定了理論基礎。目前,模糊推理系統已成功應用于自動控制、數據分類、決策分析、專家系統以及計算機視覺系統之中。
本文研究車輛主動空氣懸架的控制問題,在車輛主動空氣懸的常規PID控制器的基礎上,運用模糊推理對常規PID控制器進行參數在線修訂,控制策略融合了PID控制和模糊控制的優點,設計了基于單輪車輛主動空氣懸架的Fuzzy—PID控制器,并對Fuzzy—PID控制的單輪車輛主動空氣懸架進行Matlab建模和仿真試驗。仿真結果表明,與車輛被動空氣懸架、常規PID控制的車輛主動空氣懸架相比,Fuzzy—PID控制的車輛主動空氣懸架可大大降低車身加速度和懸架動行程,提高車輛乘坐舒適性和操縱穩定性,具有良好的魯棒性,從而驗證了Fuzzy—PID控制器的有效性和實用性。
1 單輪車輛主動懸架和路面激勵
設計車輛懸架系統時,可把單輪車輛主動懸架模型(即單輪車輛模型)簡化成一個彈簧-阻尼系統,該系統的力學模型如圖1所示。

單輪車輛主動懸架的數學模型為:

式中,m1為車身質量,m2為懸架質量,x1為車身垂直位移,X2為懸架垂直位移,U為路面激勵,k1和k2為彈簧胡克系數,b1和b2為阻尼系數。
路面不平度隨機激勵為:
![]()
式(3)中:no為參考空間頻率,Gq(no)為參考空間頻率下的路面功率譜密度,w(t)為白噪聲。
2 Fuzzy-PID控制器設計
2.1 設計思想
以車身垂直速度與其期望值的差值e及差值變化率ec作為控制器的輸入量,根據實際需要的PID控制參數Kp、Ki、Kd相對于e和ec的模糊關系來確定模糊規則,通過在原來的單純的PID控制器上加入模糊推理器,組成Fuzzy-PID控制器可以對參數進行在線修正,使系統的動態特性明顯提高,并且顯著的提高了系統的抗干擾能力和魯棒性,同時可以減少調節的時間。Fuzzy-PID控制器的原理框圖如圖2所示。

該系統實現PID參數在線自調整的計算公式為:
式中:KP、KI、KD為控制器的最終控制參數,Kp、Ki、Kd為常規PID控制器參數,kp、ki、kd為模糊推理器的修正參數。
2.2 模糊推理器及模糊規則的建立
模糊推理需要3個步驟:模糊化、模糊推理判斷和解模糊化。模糊化過程將實際的輸入量轉化為模糊量,經過基于模糊規則的模糊推理和判斷,最終將模糊量轉化為真實量,完成解模糊化的過程,這也是模糊控制器的工作原理及核心。
本文模糊推理器采用雙輸入、三輸出形式,控制器類型選為Mamdani型,解模糊規則選擇為Centmid法,輸入輸出隸屬函數均選擇為trimf形式。選取輸入變量e和ec及輸出變量kp的論域均為(-6,6),模糊子集定義為{NB NM NS O PS PM PB},選取輸出變量ki和kd,ki和kd只取正值,論域為(-3,3),模糊子集為{O PS PM PB}。通過閉環運行及模擬,觀察系統響應曲線,分析得到控制器參數kp、ki、kd對系統的實際影響,結合PID控制器參數整定理論,來確定最終的模糊規則,具體如表1所示。

1)|e|較大時,為盡快消除偏差,提高相應速度,kp應取較大值,ki取0;|e|較小時,為繼續消除偏差,并防止超調過大,kp取值應減小,同時ki取小值。
2)e·ec<0時,被控量朝著接近給定值的方向變化,若|e|較大,此時kp取中等或小值,ki取中等值,kd取0,以加快控制的動態過程。
3)|e|的大小表示的變化速率,|e|隨的增大,kp應減小。
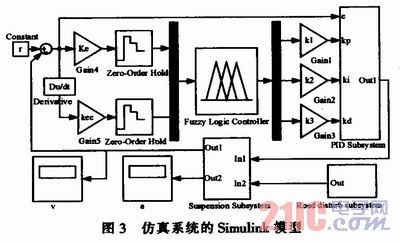
2.3 Fuzzy-PID控制器
模糊推理器結合常規PID控制器組成Fuzzy—PID控制器,將單輪懸架子系統、路面隨機激勵子系統和Fuzzy-PID控制器進行組合,得到整個仿真系統的Simulink模型如圖3所示。
3 仿真試驗
Simulink搭建的模型中,車身質量m1=2 500 kg,懸架質量m2=320 kg,懸架彈簧的彈性系數k1=80 000 N/m,阻尼系數b1=350 Ns/m,模擬輪胎的彈簧彈性系數k2=500 000 N/m,阻尼系數k2=15 020 Ns/m,假定汽車在B級路面上,以20 m/s的速度行駛。分別對采用常規PID控制的主動懸架和采用Fuzzy—PID控制的主動懸架的進行仿真,仿真結果如圖4和圖5所示。

3.1 結果分析
仿真結果表明采用PID控制器的主動懸架可以改善汽車的行駛平順性,而當采用Fuzzy—PID控制器時,控制效果可以進一步提高。采用Fuzzy—PID控制的主動懸架,無論是車身的速度還是加速度均比被動懸架和采用常規PID控制的主動懸架有很大降低,優勢十分明顯。
4 結束語
本文研究車輛主動空氣懸架的控制問題,在車輛主動空氣懸的常規PID控制器的基礎上,運用模糊推理對常規PID控制器進行參數在線修訂,設計了基于單輪車輛主動空氣懸架的Fuzzy-PID控制器,并對Fuzzy-PID控制的單輪車輛主動空氣懸架進行Matlab建模和仿真試驗。仿真結果表明,與車輛被動空氣懸架、常規PID控制的車輛主動空氣懸架相比,Fuzzy—PID控制的車輛主動空氣懸架可大大降低車身加速度和懸架動行程,提高車輛乘坐舒適性和操縱穩定性,具有良好的魯棒性,從而驗證了Fuzzy—PID控制器的有效性和實用性。