
自平衡人形機器人的多關節協調控制一直是機器人學研究的難點和熱點,目前采用的最多的是在大的反饋控制環路中對機器人進行關節空間的控制,這種控制方式結構緊湊,實時性強,但在以控制器為核心的輻射式控制鏈路上,所有信息的交換都集中在機器人主控制器上,當機器人處于復雜的環境中時,可能會有過多的信息需要處理,這種復雜程度往往是不可預知的,因此機器人的穩定性也不能保證。
機器人主控制器是機器人的核心處理器,是提高人形機器人的信息處理能力的主要部件。其主要任務是控制機器人在空間的運動位置、姿態、軌跡、操作順序和操作時間,因此必須保證主控制器能夠為解決復雜信息處理而穩定可靠地工作。機器人動作控制器是為解決機器人動作控制而設計的,它將主處理器發出任務處理命令分配到3個16位超低功耗單片機(MSP430F149)上去執行,實現多層次的控制管理。該人形機器人具有多關節,多自由度,自平衡的控制需求,需要動作控制器在機器人系統控制中起到關鍵性的作用。
1 動作控制器的設計
1.1 體系結構
自平衡人形機器人需要獲取不可預知的環境信息以及自身姿態信息進行綜合運算并及時進行自身姿態的調整。機器人的這種行為特點決定了機器人的整體控制結構要采用反饋控制。如圖1所示,描述了這種反饋控制結構的硬件實現。
同時,在圖1中可見從機器人主控制器到執行元件(舵機)之間,有一層動作控制器的結構。這一層結構的任務是實現控制命令到舵機控制信號之間的功能轉換,這種體系結構的設計,就是借鑒計算機系統結構中的分層結構體系思想。采用這種分層的結構,實現了軟件和硬件、命令和動作的相對隔離。其突出的優點體現在能夠使主控制器專注于數據的處理,而對下行設備只負責發送指令,對于硬件的復雜的操作時序,由動作控制器負責產生。

1.2 實現過程
1.2.1 硬件實現
為滿足機器人整體控制體系結構中指令到執行的層次性要求,動作控制器需要完成命令解析,信號驅動等任務。如圖2描述了動作控制器內部的結構,其主要由串行總線、3個可并行工作的16位單片機、信號驅動部分構成。這種結構能夠從總線接收命令,單片機進行指令解析并輸出控制電信號,外部電路對控制信號驅動放大,從而分別實現對執行舵機的控制。圖3為動作控制器中一個單片機工作模塊的硬件原理圖。

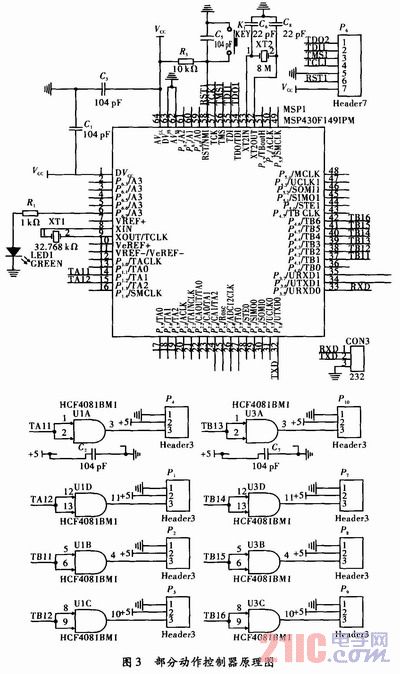
動作控制器主要由3個MSP430F149并行工作,每個MSP430F149控制8個舵機,總共實現對24個舵機的控制。每個MSP430F149有定時器TA和定時器TB兩個模塊,其中定時器TA通過比較模式輸出2路PWM波控制2個舵機,定時器TB通過比較模式輸出6路PWM波控制6個舵機。而且定時器工作在比較模式下時,能在一次設置完成后,不需要CPU干預的情況下持續進行PWM輸出,同時保證各路信號之間沒有干擾,因此一路比較輸出即可獨立控制一個舵機,動作控制器可實現對多達24個舵機的控制,對多關節人形機器人提供足夠的控制通道。
采用比較輸出PWM波形的方法相比較采用中斷方式的控制方法,具有簡單,輸出PWM波形穩定,整個控制系統的魯棒性高等特點。該課題也曾采用過中斷控制方式,但用示波器觀察輸出的PWM波形,波形極不穩定。而且中斷嵌套過多之后,單片機程序很容易跑飛,完全不能滿足控制系統的穩定性要求。而采用文中所述動作控制器的設計方法后,比較輸出的PWM波波形穩定,而且單片機也沒出現死機或跑飛的現象。
MSP430F149輸出為3.3 V TTL電平,而舵機控制信號要5 V TTL電平,在實際電路設計中要進行電平轉換。考慮到舵機的控制信號對功率沒有要求,必要加專用驅動芯片,而采用CMOS工藝的CD4081四2輸入與門進行電平轉換,利用其門電路輸入電壓門限寬的特點即可解決電平轉換的問題。
舵機動態工作時,需要脈沖式的電流,通過普通的電源供電,實驗表明:由于舵機瞬時供電不足,致使舵機力矩不夠,運動不能達到預先的姿態效果,在反復探索后,決定采用電容的快速放電特性來提供瞬時大電流,由于舵機數量大,設計時在舵機電源處并接大容量電容,總容量0.22F×6。正常小電流工作時,電容被充電處于飽和,當需要瞬時大電流時,電容能快速放電,從而保證舵機正常穩定的工作。
3個MSP430F149分別控制部分關節上的舵機,這要求3個MSP430F149充分協調一致的工作。因此采用總線通信方式,將3個MSP430F149掛接到串行通信總線上,并留出總線接口,以接收主控制器的命令。
1.2.2 軟件實現
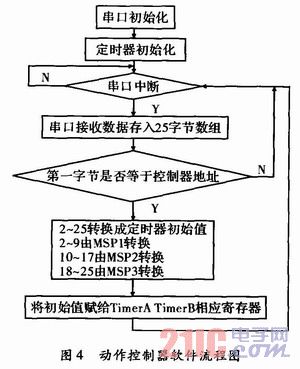
動作控制器的軟件設計,是以硬件為基礎,接收主控制器的命令,對命令進行解析,并控制產生具體的PWM波形對舵機進行動作控制。圖4描述了動作控制器中軟件的實現流程。
機器人的動作方式,方向,幅度等全部是由主控制器通過對外部信息的獲取而產生的輸出,這種輸出是基于命令格式的,而機器人最終的一切行為都是一系列舵機的配合運轉,從命令到執行,這其中就是動作控制器起到了關鍵作用。
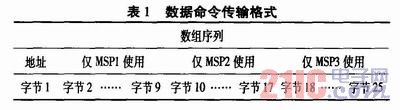
基于上述要求,動作控制器的首要任務就是接收命令。雖然在硬件上采用了多機通信的模式,但并不采用傳統的通信協議(每個從機都具有一個獨立的地址),而是對動作控制器上的3個MSP430F149定義完全相同的地址,這樣就會使其接收到完全相同的命令。這樣進行設計,原因在于要保證舵機響應的同時性,即是機器人動作的協調性提出的要求。如表1示例了主控制器與動作控制器的命令傳輸格式。來自主控制器的命令是一個數組序列,動作控制器上的每個MSP430F149都能完全接收到全部序列,而每個MSP430F149根據預先定義只使用這個序列中特定的子序列,這個子序列就是對應于這個MSP430F149所控制的舵機的命令,這樣就可以保證同時性。
動作控制器的最終目的是產生PWM波,而這是通過寫MSP430F149片內TA、TB模塊的寄存器實現的。在解析函數進行一系列的解析運算后,產生出各舵機所需的PWM波形的脈沖寬度值,將這些值寫入到相應的寄存器中,就可以產生需要的PWM波。
2 實驗及結論
根據文中提出的動作控制器的設計思想與方法,制作出機器人動作控制器。按照設計的基本思想對動作控制器進行測試,測試中采用一個MSP430F425作為機器人主控制器,下行控制一個十二個關節的簡易人形機器人。在MSP430F425中規劃好機器人的步態,同時根據規劃好的步態參數發送舵機動作命令。
實驗中,首先實測舵機的精度,通過向特定定時器通道預裝不同值,測量舵機響應角度,并以此數據擬合出舵機響應角度方程。實驗中由于采用的MSP430F425資源有限,方程僅進行了線性擬合。
表2為測試機器人上一處關節的舵機測定數據,根據此數據擬合出以下方程:
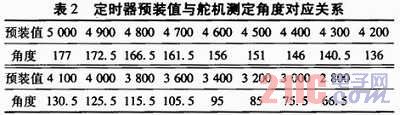
舵機實際角度α=(X-3 000)/20+75.5運用擬合出的方程進行命令到舵機角度的解析,得到表3所示數據

從表中數據可以看出,在舵機的性能范圍內(舵機的精度為0.5°~1°),控制是精確的。
同時,在舵機響應的及時性方面,也得到了保證。從主控制器發送命令到舵機響應開始運動共經歷了命令傳輸、命令解析兩大時間段。
命令傳輸在特定的速率下傳輸完所有命令數據用時4.5 ms,而命令解析即單片機內程序執行,其用時遠小于1 ms。相比較,舵機的機械響應時間在百ms級,因此動作控制器保證了響應的及時性。
實驗證明,在設計思想指導下的硬件和軟件實現,充分符合既定的目標,體現在機器人的多關節能夠協調動作,預先規劃的步態能夠很好的表現出來。
在機器人的實際控制系統中,動作控制器作為主控制器(ARM 9)的下級從屬設備,完成其特定的管理范圍內工作。在這種分層控制的體系結構下,自平衡的檢測與控制達到了理想的效果。
3 結束語
由于自平衡人形機器人具有內在不穩定性和結構的復雜性,國內外機器人愛好者對其控制策略進行了多方面的探索,但通常都是采用反饋控制環路或者是分層體系結構的方法。采用這些傳統的方式大體都是中央處理器(ARM、DSP等)接收收集到的信息,進行處理,再根據獲取的信息運用一定的算法控制執行元件(舵機、直流電機等)。這類體系結構一般以惟一的處理器為核心,與外界直接進行信息交換,但其處理器的工作量大,在大量的處理中實時性難以保證。
而本設計對應的雙足自平衡人形機器人采用了這兩種經典結構的復合,其中執行控制器、主控制器和執行電機之間體現出了明顯的層次結構,這種設計減輕了各層次的任務難度,明顯提高了設備調試或故障排查效率,充分體現出這種體系結構的優越性。